Abstract
The problem of synthesis of the controlled movement of the stepping robot, the movers of that move on trajectories with the sites, which are close to rectilinear, is considered. Stabilization of movement of points on the movers of stepping robot on a rectilinear trajectory will allow synthesizing algorithm of stepping without jumps of the accelerations in points of change of phases of a support of movers. In this case, under the control object, the point of mover is understood, and the controlled coordinate is a corresponding coordinate of such point.
1. Introduction
In this work, the scheme of synthesis of the self-oscillatory modes of the movement of multivariate mechanical system, which allows receiving the periodic movements of links, for example, in problems of the movement of multivariate robotic devices of any structure, is considered. It is offered a methodology of synthesis of nonlinear generators of asymptotically stable trajectories, which provide the stable movement of the set points of the control object on such trajectories.
The scheme of synthesis can be used in the trajectory problems of robotics, at the construction of generators of oscillations and frequency converters.
Unlike the methods of control that exercise the control on a deviation, the offered generators of self-oscillations give stable movement on the set trajectories and require measurement of smaller number of parameters of the controlled movement.
So in robotic problems at a control by movement on the closed trajectories, it is possible to use general characteristics of coordinates – amplitude, period etc., for finding by method of inverse problem of the controlling functions, for example, of force in drives. Necessary condition to which has to satisfy the controlling functions is providing of stability that for the nonlinear system is a non-trivial problem.
The scheme of synthesis of the self-oscillatory modes of the movement supposes that the system is supplemented by the blocks, which are carrying out the solution of the nonlinear differential equations on which entrance some general parameters of the movement of object arrive, and at the exit, the controlling functions for executive drives are formed. The controlling functions of such nonlinear generator can be internal variables, for example, at the use in the converters of tension, or some regenerate sizes, which are received on the basis of internal variables, for example, by the method of inverse problem in robotics.
2. Problem of receiving the stable movement of control object on the set trajectories
For a task of control object in the form of spatial mechanical system dynamics equations in the form of the differentially algebraic equations are usually used [2, 3].
For example, movement of stepping robot described by differentially-algebraic equations of kind:
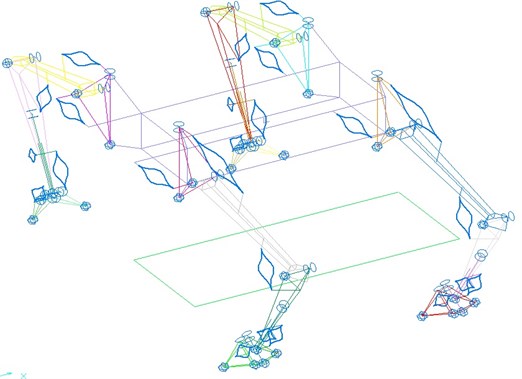
where – is the vector of general coordinates of the controlled system (object of control), is the matrix of inertia of the system of bodies, is the vector of external and internal forces of control object, is the vector of controlling forces, which are forces in the drives. is the matrix of variable coefficients of equations of kinematics connections by a dimension , is the vector of right parts of equations of connections, is the vector of Lagrange multipliers. The settlement scheme of stepping robot (Fig. 1) is contain 25 rigid bodies with 6 DOF (matrix ), 120 kinematics constraints (matrix , vector ), weight forces (vector ) and 24 control forces in drives (vector ).
Fig. 1The settlement scheme of the stepping robot
One of universal methods of determination of forces in drives is a method of reverse problem. For the system Eq. (1) the method of reverse problem is taken to the task of additional kinematics connections, providing the movement on the set program trajectories. Control of system is reduced to movement of her points on the trajectories , found, for example, by the methods of optimal control.
Action of controlling forces in Eq. (1) of movement can be replaced with the equations of connections. Then Eq. (1) becomes:
where is the matrix of variable coefficients of equations of connections for points movement of that is set, is the vector of accelerations of the specified points, is the vector of Lagrange multipliers, corresponding to connections with the set program trajectories. Components are included in the vector , which describe trajectories of the movement of corps of robot and end-point of the movers.
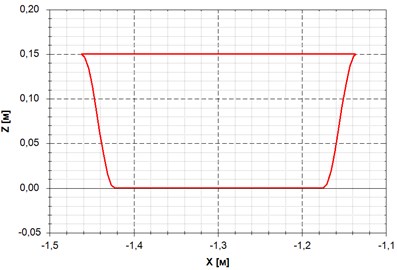
We will set the rectilinear movement of corps with a constant speed and the periodic movement of end-point of feet. Thereby we get the movement of the robot. The program movement of point is shown on Fig. 2 and consists of the sites, which are close to rectilinear. The trajectory in Fig. 2 is piece-analytical. It is made of various functions, which are analytical on each site. In points of joining of sites, function has a break on derivatives.
Fig. 2The trajectory of point of foot
From the decision of system Eq. (2) it is possible to find controlling functions for every drive. An empiric piece-nonlinear task is thus assumed of functions, which describe trajectories of end-point of stepping movers. It will result in the saltatory changes of forces in drives.
In this connection, an important problem is providing of stable movement of all system Eq. (1) at the set closed trajectories of the movement of separate points. For the case of stepping machine such closed trajectories have a form near to rectangular, i.e. trajectories consist of almost rectilinear areas.
3. Analytical constructing of generators of self-oscillations
To provide the stable movement of the set points of object of control it is offered to add system Eq. (1) by means of the equations of connections with the nonlinear differential equations. These equations are generators of program trajectories and their solutions are closed, asymptotically stable curves of the set form [4-6]. The system Eq. (1) is supplemented with the Eq. (3):
where is the vector of general coordinates of the generator of periodic movements, is the vector of the right parts of the generator, and is the vector of equations of connections between the generator and the object of control. Generally, these connections are nonholonomic, nonintegrable.
For definition of structure a vector – functions of system Eq. (3) the problem of synthesis of generators of self-oscillations is solved with the movement trajectories with the sites, which are close to rectilinear:
where ; , , .
The solution of the problem is based on construction of Lyapunov function [1]. Approach to the solution of a problem of synthesis consists in finding of the stabilizing intrasystem controls in phase space of each of the subsystems and intersystem controls which to connect these subsystems. The construction of the intrasystem control solves a problem of synthesis of the self-oscillatory mode in the corresponding subspace. Geometrically it corresponds to the birth in a phase subspace of a stable limit cycle with the movement sites, which are close to rectilinear (Fig. 3(a)). Introduction of intersystem controls provides the required dynamic descriptions of all system overall. We will search controlling functions in a next kind:
where , , .
Such nonlinearity allows increasing significantly flexibility of controls concerning change of geometry of limit cycles (Fig. 3).
Fig. 3Stable limit cycles
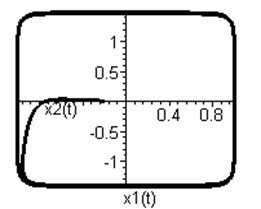
a)
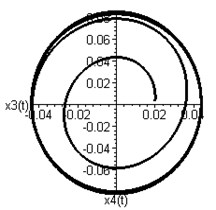
b)
Using the condition of invariance of a surface [4, 5] :
correlations on the coefficients of the stabilizing controls are found:
where , , .
When performing conditions Eq. (5) on coefficients of functions of control the border is asymptotically attracting for trajectories, with the entry conditions defined in variety and in some - layer adjoining a surface from the outside i.e. the set is area of asymptotic stability of invariant variety of system Eq. (5).
In the work, use of the offered differential equations in systems of generation of program movements of links of robots is considered. At the same time, the attracting invariant varieties provide the stable movement of object on the set trajectories.
The movement of the stepping machine with four movers is given in Fig. 1. The controlled points coincide with end-point of fingers of movers. The feature of this application is a presence of a few controlled links, which make the movements displaced in time.
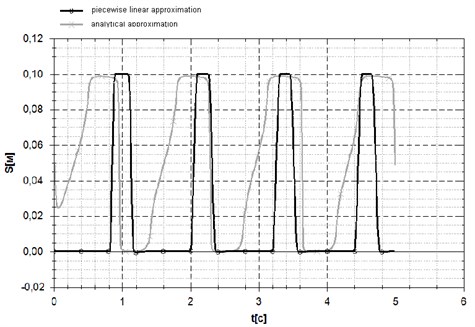
In Fig. 4 the schedules of vertical movements of the controlled point of foot of the stepping drive are shown. Schedules are received by the method of analytical approximation and usual piecewise linear approximation.
The trajectory, which is received by the offered method, contains sites of constant level that it is necessary for work of stepping drive.
Fig. 4Vertical movement of foot
4. Conclusions
In this paper, the procedure of embedding of generators of asymptotically stable trajectories with the sites, which are close to rectilinear in multivariate objects of control, is received. Thus, stability of movement of all system as a whole is provided and nonlinear properties of multivariate object of control of any structure are considered. The function, which sets the program movement, is analytical in space of conditions of a control system, is asymptotically stable and is close to a program trajectory.
References
-
Lyapunov A. The General Problem about Stability of the Movement. Gostekhizdat, Moscow, 1950, (in Russian).
-
Shabana A. Dynamics of Multibody Systems. Cambridge University Press, New York, NY, 2005.
-
Fumagalli Alessandro, Gaias Gabriella, Masarati Pierangelo A simple approach to kinematic inversion of redundant mechanisms. ASME International Design Engineering Technical Conferences and Computers and Information in Engineering Conference, 2007, p. 1931-1939.
-
Gorobtsov A., Ryzhov E., Churzina A. Lame – manifolds in problems of synthesis of nonlinear oscillatory modes. Journal of Vibroengineering, Vol. 10, Issue 4, 2008, p. 456-459.
-
Gorobtsov A., Ryzhov E., Churzina A. Multipurpose generators of self-oscillations. Izvestia VSTU, Vol. 11, Issue 9, 2009, p. 19-22, (in Russian).
-
Gorobtsov A., Grigoryeva O., Ryzhov E. Attracting ellipsoids and synthesis of oscillatory regimes. Automation and Remote Control, Vol. 70, Issue 8, 2009, p. 1301-1308.
About this article

