Abstract
With the increasing prevalence of neurological and musculoskeletal disorders, the demand for effective rehabilitation technologies has grown. This study presents the AlmatyExoElbow system with a cable-driven exoskeleton for elbow rehabilitation with two degrees of freedom. The device was designed in SolidWorks CAD and tested in SolidWorks Motion to evaluate flexion/extension and pronation/supination trajectories. The design is simple, adaptable, and cost-effective, making it a promising candidate for future clinical integration and personalized therapy.
Highlights
- A novel cable-driven elbow exoskeleton (AlmatyExoElbow) with 2 degrees of freedom was developed for rehabilitation purposes.
- The device was designed in SolidWorks and simulated in SolidWorks Motion to evaluate key elbow movements.
- The exoskeleton is simple, adaptable, and cost-effective, offering strong potential for clinical and home-based rehabilitation.
1. Introduction
Neurological and musculoskeletal disorders such as stroke, trauma, cerebral palsy, and arthritis are among the leading causes of long-term disability worldwide. According to the World Health Organization, stroke affects over 15 million people annually, with about 5 million left permanently disabled many of whom require prolonged physical rehabilitation to recover basic motor functions. The elbow joint plays a vital role in many activities of daily living (ADL), including lifting, reaching, eating, and self-care. Injuries or neurological impairments affecting the elbow can significantly reduce a person's independence and quality of life [1-2].
Traditional rehabilitation methods typically involve manual therapy under the supervision of specialists. While effective, these methods are labor-intensive, time-consuming, and often lack consistency in reproducing precise movements. Furthermore, access to personalized therapy may be limited by economic and geographic constraints. In response, robotic rehabilitation systems have emerged, offering consistent, programmable, and adaptive therapeutic interventions. However, challenges remain many existing systems are too complex, expensive, or bulky for widespread clinical use or home-based rehabilitation.
For example, [3] presents a planar robotic exoskeleton with three degrees of freedom for rehabilitation and assessment, showcasing the potential of such systems. In [4], the authors extended this concept by developing a wearable mechatronic brace for hand rehabilitation. The Auxilio model a wearable cable-driven exosuit for shoulder and elbow support is introduced in [5], while the CADEL device described in [6] demonstrated promising results in early testing phases. Moreover, the literature discusses the use of cable systems in hybrid pneumatic designs for elbow prosthetics [7]. Soft wearable cable-driven robots have also been explored, providing active assistance in rehabilitation, including devices aimed at enhancing elbow joint functionality [8]. Several studies [9, 10] have validated the versatility of such systems in upper limb (elbow, shoulder, hand) and lower limb rehabilitation, demonstrating their potential in the field of medical robotics.
The aim of this study is to develop and evaluate a simple, low-cost, and customizable cable-driven elbow rehabilitation device. The design features two degrees of freedom and is modeled using CAD software. Kinematic simulations were conducted in SolidWorks Motion to analyze the system’s mechanical performance during typical rehabilitation movements.
The novelty of the proposed system lies in its integration of affordability, adaptability, and mechanical simplicity within a 2DOF cable-driven configuration. Unlike conventional robotic rehabilitation devices that rely on complex actuators and rigid linkages, this design employs a lightweight and modular cable mechanism, reducing production costs and increasing patient comfort. Additionally, the device is designed to be easily reconfigurable for various elbow movement therapies, making it suitable for home-based rehabilitation and adaptable to individual patient needs. This approach enhances accessibility to effective motor recovery tools, especially in resource-limited clinical settings.
2. Design of the proposed system
The cable-driven mechanism forms the core of the elbow rehabilitation system, combining simplicity, efficiency, and adaptability. The main structure is designed to be fabricated from lightweight PLA plastic, ensuring minimal weight and enabling customized adjustments to the system. The design emphasizes modularity, facilitating easy assembly, maintenance, and component replacement.
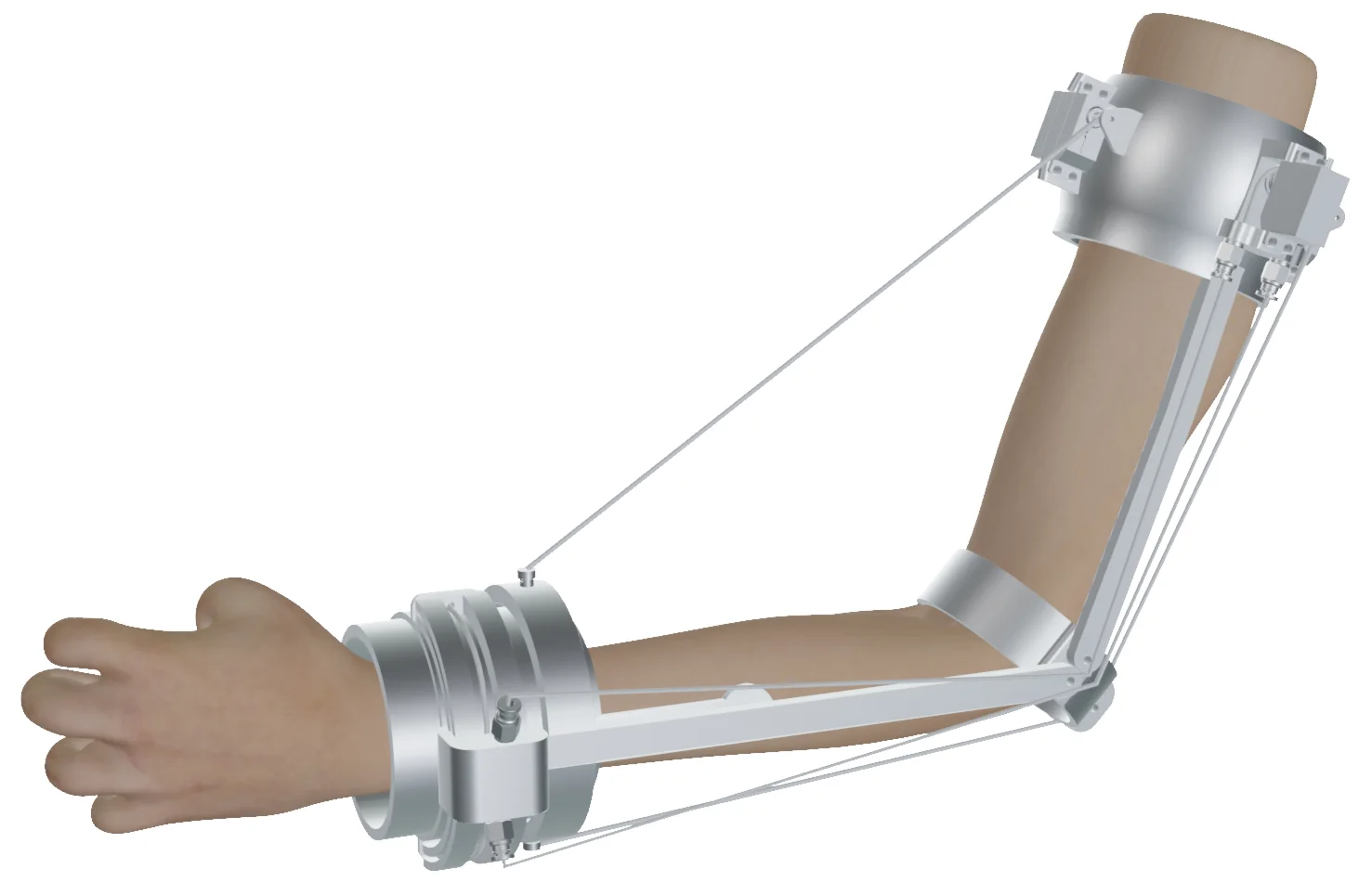
The actuation system is based on servo motors for precise control of position and speed. The servos transmit force to the cables through a roller-based routing system, specially designed to minimize friction and ensure smooth force transmission, as illustrated in Figure 1. The working principle of the cable mechanism involves transferring force from the servo motor to the movable links of the structure via flexible cables. As the servo rotates, the pulley winds or releases the cable, generating movement at the target joint.
The cable passes through guiding rollers, which reduces friction and maintains system stability. This configuration allows the actuators to be mounted remotely, reducing the load on the user's arm and increasing overall comfort. Thanks to its flexibility, smooth motion, and reduced mechanical complexity, the cable-driven mechanism offers an optimal solution for safe and effective upper limb rehabilitation.
The ergonomic design ensures a natural arm position for the user, minimizing joint strain during exercises. Patient safety is a key consideration in the system's development. Built-in mechanisms ensure safe operation during rehabilitation exercises:
Load limitation: The system includes software-based torque limits to prevent the application of excessive force that could harm the patient.
Range of motion limitation: Both physical and software-based constraints define a safe joint movement range, preventing hyperextension or excessive flexion.
Fault detection: The system continuously monitors motor performance and cable tension in real-time, automatically halting operation if anomalies are detected.
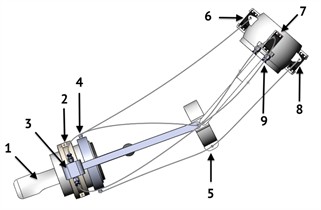
The integration of these features ensures a safe, comfortable, and adaptive rehabilitation process, making the system suitable for a wide range of patients with varying degrees of elbow joint impairment. Fig. 2 shows the CAD model of the elbow rehabilitation system. The device consists of several components that provide a reliable and controlled rehabilitation process for the elbow joint.
Fig. 2 highlights the following elements of the rehabilitation system: 1 – Handle, used for securing the arm and ensuring correct motion during the rehabilitation process. 2, 3 – Guide rail and carriage mechanism, responsible for pronation and supination movements. 4 – Cable attachment point, used to connect the cable to the servo motor responsible for elbow flexion. 5 – Elbow ring, which serves as a connecting element between different mechanisms. 6, 7, 8 – Servo motors that drive the system’s motion. Servo motor 6 controls elbow flexion, servo motor 8 controls extension, and servo motor 7 manages pronation and supination movements. 9 – Connector, used for securely attaching the cable to the servo motor.
Fig. 1Design of a rehabilitation exoskeleton for the elbow joint
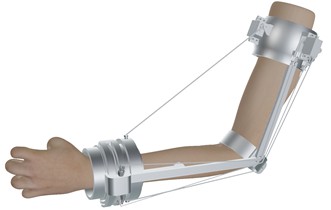
Fig. 2CAD model of the elbow rehabilitation system
The AlmatyExoElbow exoskeleton provides two primary types of elbow joint movements: flexion/extension and forearm pronation/supination, corresponding to two degrees of freedom. These movements are controlled via a cable-driven system and three servo motors.
Flexion is achieved by tensioning a cable connected to servo motor 6, which pulls the cable through a dedicated attachment point, causing the elbow joint to bend. Extension is controlled by servo motor 8, which applies force in the opposite direction. Pronation and supination are implemented using a guide rail with a movable carriage driven by servo motor 7, which rotates the forearm around its longitudinal axis.
All forces from the servo motors are transmitted through a roller system, minimizing friction and ensuring smooth and precise motion. The design includes a fixation handle that maintains the correct position of the patient’s arm during training, as well as connective elements that securely attach the cables to the actuators.
This system enables a high degree of control, safety, and adaptability in the rehabilitation process for patients with impaired elbow joint function.
3. Kinematic analysis
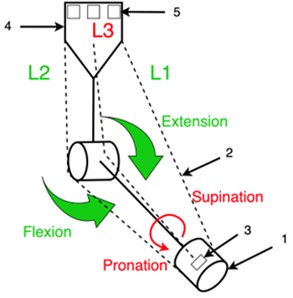
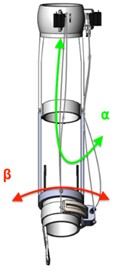
Fig. 3 shows the kinematic scheme of the AlmatyExoElbow exoskeleton, which features two degrees of freedom (2-DoF) and is designed to support the natural movements of the elbow joint. The system is responsible for two primary motions: elbow flexion/extension and forearm rotational movement pronation/supination.
The angle represents the flexion and extension movement of the elbow. This movement involves bending and straightening of the elbow joint, occurring within a range of approximately 0 deg. to 150 deg. It is actuated by the cable elements and , which are routed around the elbow joint. These cables are tightened or loosened by a motor to generate the required motion amplitude.
The angle describes the rotational movement of the forearm pronation and supination. This movement occurs within a range of approximately ±80 deg. and allows the palm of the hand to face either upward or downward. The motion is achieved using the cable, which is positioned around the wrist and controlled by a dedicated actuator.
The combination of these movements enables precise control of the position and orientation of the wrist (end-effect) in space. Such a system allows for accurate tracking of motion during rehabilitation exercises, reducing muscle strain and replicating the natural trajectory of joint movement.
Fig. 3Kinematic scheme of the AlmatyExoElbow exoskeleton
4. Control architecture
The control architecture of the cable-driven elbow rehabilitation device integrates various hardware components and control algorithms to ensure movement precision, adaptability, and patient safety. This section describes the key elements, their interactions, and the overall functionality of the system based on the presented schematics.
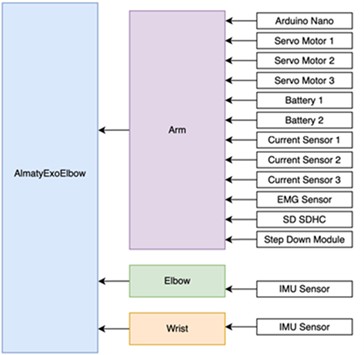
Fig. 4Block diagram of the AlmatyExoElbow cable-driven rehabilitation device
The control system is based on an Arduino Nano microcontroller, which acts as the central processing unit. It coordinates input data from various sensors and manages the servo motors to perform rehabilitation exercises. The device monitors joint movements and muscle signals in real time, adapting commands to the actuators for effective support.
Fig. 4 illustrates the block diagram of the cable-driven elbow rehabilitation device. The control architecture of the AlmatyExoElbow device is built on a modular system, ensuring precise and adaptive execution of rehabilitation movements. The central component is the Arduino Nano microcontroller, which coordinates the operation of all modules. Three servo motors (Servo Motor 1, 2, and 3) are connected to the Arduino, responsible for elbow flexion, extension, and pronation/supination. Power is supplied by two batteries (Battery 1 and Battery 2), while a step-down module stabilizes the voltage for sensitive components. To monitor current consumption, the system uses three current sensors (Current Sensor 1-3), allowing real-time tracking of the load on each actuator and preventing overloads.
For biological feedback, an EMG sensor is employed to detect the patient’s muscle activity. The received data enables the system to adapt actuator force according to muscle tension, which is particularly important during active rehabilitation. All collected data is logged onto an SD/SDHC memory card for further analysis.
Additionally, IMU sensors are placed near the elbow and wrist to monitor the spatial orientation and movement of the limb in real time. These data help the system accurately determine the movement phase and adjust actuator commands according to the patient’s biomechanics.
The entire system is integrated into the Arm module, which connects all hardware components to the main body of the exoskeleton.
Fig. 5 shows the complete electrical schematic of the AlmatyExoElbow device, illustrating the interaction between all hardware components of the system. The Arduino Nano is used as the central controller, responsible for managing three servo motors, processing sensor data, and coordinating all system elements.
The system is powered by two 9V batteries, connected through a step-down voltage converter, which stabilizes the output voltage to levels suitable for the Arduino and sensors. The servo motors are directly connected to the power source through current sensors, which monitor the current delivered to each motor to prevent overload and ensure safe operation.
The Arduino is also connected to two IMU sensors (inertial measurement units) mounted on the elbow and wrist, as well as an EMG sensor that captures muscle activity. These inputs enable the exoskeleton to adapt its movements in real time according to the patient’s physical condition.
For data logging, an SD memory card is integrated into the system via an SPI interface. This allows all parameters including sensor signals and real-time actuator control data to be recorded for later analysis and diagnostics.
Fig. 5Electrical circuit design of the AlmatyExoElbow Device
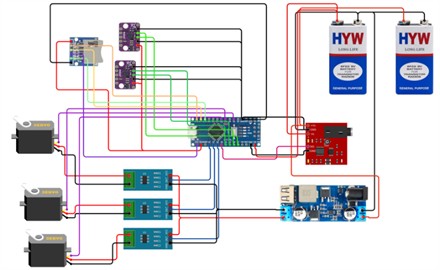
Fig. 6Rotation angles of the rehabilitation system
5. Test results
Initial testing of the cable-driven elbow rehabilitation device was conducted in the SolidWorks Motion simulation environment to evaluate its performance characteristics, functionality, and suitability for rehabilitation applications Fig. 6.
Fig. 6 presents the rotation angles and for the two degrees of freedom of the exoskeleton designed for the elbow joint. Angle corresponds to flexion and extension movements of the elbow, while angle represents the rotational movements of pronation and supination. These angles are key parameters that define the range of motion of the elbow joint within the exoskeleton’s design.
Fig. 7 shows the angular displacement of angle (pronation-supination) over time. The movement varies between 86 deg. and 98 deg. following a sinusoidal pattern over a 4 second cycle, starting at 98 deg. decreasing to 86 deg. and then returning back to 98 deg. This smooth motion demonstrates the effectiveness of the system for joint rehabilitation.
Fig. 8 shows the angular acceleration of angle (pronation–supination) over time. The acceleration oscillates within a range of ±0.10 deg/s2, following a sinusoidal pattern with a 2 second cycle. The components along the -axis (blue) and -axis (orange) demonstrate synchronized movement, indicating controlled and stable dynamics suitable for rehabilitation purposes.
Fig. 7Angular displacement of the β angle (supination-pronation) over time
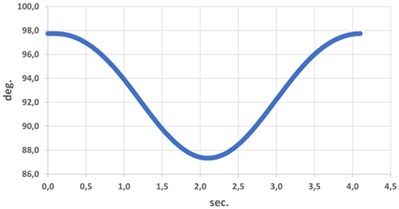
Fig. 8Angular acceleration of β angle (supination-pronation) over time
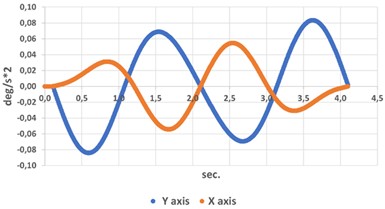
Fig. 9 shows the acceleration of angle (in mm/s2) over time (in seconds). The sinusoidal nature of the graph indicates periodic motion, with acceleration ranging from 0.2 mm/s2 to 1.6 mm/s2 over a 2 second cycle. This highlights the stable and repetitive dynamics, allowing for analysis of the kinematic behavior of angle .
Fig. 10 shows the angular velocity of angle over time, demonstrating a sinusoidal pattern. The velocity smoothly oscillates between –10 deg/s and +15 deg/s over a 4.5 second cycle, transitioning from counterclockwise to clockwise rotation. The peak values indicate moments of maximum acceleration, while the zero-crossing points correspond to changes in the direction of movement.
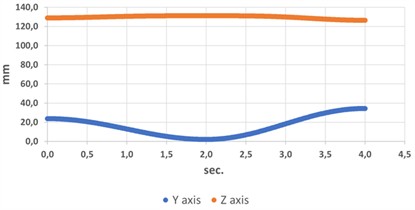
The linear displacement of angle exhibits oscillatory motion along the -axis (within the range of 0 to 40 mm) and stability along the -axis (approximately 120 mm).
This indicates periodic vertical motion along the -axis with minimal displacement along the -axis, reflecting the controlled and precise rehabilitative movement of the exoskeleton.
Fig. 9Acceleration analysis of β angle during supination-pronation movement
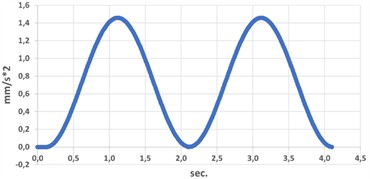
Fig. 10Angular velocity of α angle over time
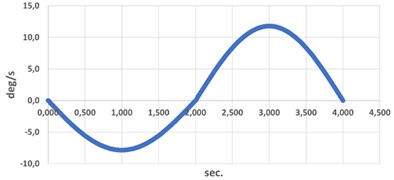
Fig. 11Linear displacement along y and z axes for α angle
6. Conclusions
This paper presents the development and initial evaluation of a cable-driven elbow rehabilitation system designed to meet the requirements of affordability, adaptability, and high-precision therapeutic performance. The future design of the device will incorporate lightweight PLA material, a modular architecture, and a cable transmission system, ensuring safety, efficiency, and ease of use. Key features of the system include servo motor actuation, real-time sensor feedback, and advanced control algorithms integrated on the Arduino Nano platform.
Initial testing conducted in SolidWorks Motion confirmed the functionality of the device and its suitability for rehabilitation applications. The results demonstrated smooth and controlled motion dynamics in angles (flexion-extension) and (pronation-supination), characterized by sinusoidal variations in angular displacement, velocity, and acceleration. The system’s adaptive control ensures both safety and precision during patient interaction, making it an effective tool for restoring elbow mobility and strength.
Future work will focus on the development of a physical prototype, clinical trials, and further optimization of the system to enhance its effectiveness and validate the results in real-world rehabilitation settings.
References
-
B. Dauren, N. Zhetenbayev, G. Balbayev, B. Shingissov, N. Arailym, and Y. Saltanat, “Development and simulation of a device for upper limb rehabilitation,” Vibroengineering Procedia, Vol. 48, pp. 29–35, Feb. 2023, https://doi.org/10.21595/vp.2023.23167
-
B. Dauren, Z. Nursultan, B. Gani, K. Ozhikenov, K. Serikbol, and Y. Saltanat, “Structural design of a rehabilitation robot for the upper limb,” in International Conference on Environmental, Mining, and Sustainable Development 2022, Vol. 3001, p. 060002, Jan. 2024, https://doi.org/10.1063/5.0195728
-
S. J. Ball, I. E. Brown, and S. H. Scott, “A planar 3DOF robotic exoskeleton for rehabilitation and assessment,” in 29th Annual International Conference of the IEEE Engineering in Medicine and Biology Society, pp. 4024–4027, Aug. 2007, https://doi.org/10.1109/iembs.2007.4353216
-
T. Desplenter, A. Kyrylova, T. K. Stanbury, A. Escoto, S. Chinchalkar, and A. L. Trejos, “A wearable mechatronic brace for arm rehabilitation,” in 5th IEEE RAS and EMBS International Conference on Biomedical Robotics and Biomechatronics (BioRob), pp. 491–496, Aug. 2014, https://doi.org/10.1109/biorob.2014.6913825
-
I. Gaponov, D. Popov, S. J. Lee, and J.-H. Ryu, “Auxilio: A portable cable-driven exosuit for upper extremity assistance,” International Journal of Control, Automation and Systems, Vol. 15, No. 1, pp. 73–84, Jan. 2017, https://doi.org/10.1007/s12555-016-0487-7
-
M. Ceccarelli, M. Riabtsev, A. Fort, M. Russo, M. A. Laribi, and M. Urizar, “Design and experimental characterization of L-CADEL v2, an assistive device for elbow motion,” Sensors, Vol. 21, No. 15, p. 5149, Jul. 2021, https://doi.org/10.3390/s21155149
-
P. Maciejasz, J. Eschweiler, K. Gerlach-Hahn, A. Jansen-Troy, and S. Leonhardt, “A survey on robotic devices for upper limb rehabilitation,” Journal of NeuroEngineering and Rehabilitation, Vol. 11, Jan. 2014, https://doi.org/10.1186/1743-0003-11-3
-
C. Thalman and P. Artemiadis, “A review of soft wearable robots that provide active assistance: Trends, common actuation methods, fabrication, and applications,” Wearable Technologies, Vol. 1, p. e3, Sep. 2020, https://doi.org/10.1017/wtc.2020.4
-
C. Jarrett and A. J. Mcdaid, “Robust control of a cable-driven soft exoskeleton joint for intrinsic human-robot interaction,” IEEE Transactions on Neural Systems and Rehabilitation Engineering, Vol. 25, No. 7, pp. 976–986, Jul. 2017, https://doi.org/10.1109/tnsre.2017.2676765
-
M. Perrelli, F. Lago, S. Garofalo, L. Bruno, D. Mundo, and G. Carbone, “A critical review and systematic design approach for innovative upper-limb rehabilitation devices,” Robotics and Autonomous Systems, Vol. 183, p. 104835, Jan. 2025, https://doi.org/10.1016/j.robot.2024.104835
-
M. Shoaib, E. Asadi, J. Cheong, and A. Bab-Hadiashar, “Cable driven rehabilitation robots: comparison of applications and control strategies,” IEEE Access, Vol. 9, pp. 110396–110420, Jan. 2021, https://doi.org/10.1109/access.2021.3102107
-
M. Hosseini, R. Meattini, G. Palli, and C. Melchiorri, “A wearable robotic device based on twisted string actuation for rehabilitation and assistive applications,” Journal of Robotics, Vol. 2017, pp. 1–11, Jan. 2017, https://doi.org/10.1155/2017/3036468
-
R. Kabir, M. Sunny, H. Ahmed, and M. Rahman, “Hand rehabilitation devices: a comprehensive systematic review,” Micromachines, Vol. 13, No. 7, p. 1033, Jun. 2022, https://doi.org/10.3390/mi13071033
-
V. Pugliese, “Graphic user interface for motion, simulation and evaluation of a planar cable-driven parallel robot,” in Proceedings of the 5th Jc-IFToMM International Symposium, Jul. 2022.
About this article

This research was funded by the Science Committee of the Ministry of Science and Higher Education of the Republic of Kazakhstan within the framework of the program AP27508009.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
