Abstract
The synchronous belt is a key transmission component in automotive steering gears, and its dynamic characteristics significantly impact the NVH (Noise, Vibration, and Harshness) performance of the steering system. To investigate the vibration characteristics of the synchronous belt under pre-tension, this study takes the steering gear synchronous belt as the research object. A three-dimensional finite element model of the synchronous belt-pulley system, considering its layered structure, is established. Pre-tension is applied using the displacement loading method, and prestressed modal simulation analysis is conducted. The results show that the system’s low-order modes are primarily characterized by overall vertical bending and torsion, while medium- and high-order modes exhibit combined mode shapes and localized vibration features. When the pre-tension displacement increases from 2 mm to 4 mm, the first-order natural frequency rises from 340.69 Hz to 464.88 Hz, but the impact on the mode shape morphology of the synchronous belt is minimal. The relative error between the simulation and experimental results for the first six natural frequencies is less than 1 %, verifying the accuracy of the established model.
1. Introduction
Synchronous belt drives have become a core transmission component in high-end equipment such as automotive steering gears, industrial robots, and CNC machine tools due to their advantages of constant transmission ratio, low noise, and high efficiency. Pre-tension, a critical parameter during installation and commissioning, directly affects transmission accuracy, load capacity, and service life. Insufficient pre-tension can lead to meshing slippage, while excessive pre-tension exacerbates fatigue wear and increases bearing loads [1]. Modal characteristics are a core indicator for evaluating structural dynamic stability. When external excitation frequencies approach the system's natural frequencies, resonance is easily triggered, leading to increased vibration, reduced accuracy, or even structural failure.
Scholars both domestically and internationally have conducted research on the dynamic characteristics of synchronous belts. Hu Qingming et al. employed multi-body dynamics methods to establish a timing system model for an in-line four-cylinder engine, analyzing the dynamic characteristics of the curvilinear synchronous belt under specific crankshaft speeds and initial tension [2]. Ge Zhenghao et al. combined multi-body dynamics simulation with experimental testing techniques to establish a dynamic test system model for a high-speed synchronous belt intermittent transmission mechanism, analyzing the testing characteristics of its key parameters [3]. Guo Jianhua et al. used flexible multi-body dynamics simulation methods to create a virtual prototype model of a new arc-tooth synchronous belt drive, analyzing stress distribution characteristics under different meshing clearances [4]. Wang Yulin et al. employed a method combining dynamic modeling based on Newton-Euler equations and parameter identification using genetic algorithms to establish a dynamic model of a timing belt mechanism driven by a PMSM, studying its parameter identification capability and model accuracy [5]. Shi Hao et al. used a co-simulation approach involving AMESim and MATLAB combined with experimental verification to establish a permanent magnet variable-frequency tensioning system model for a belt conveyor, analyzing the dynamic characteristics of impact loads and tension variation in the conveyor belt under different operational stages [6]. Li Wenbo et al. combined experiments with finite element analysis to establish a thermo-mechanical coupled model for synchronous belt drives, analyzing their temperature distribution, energy dissipation, and transmission efficiency characteristics [7]. Yimin Li et al. used multi-body dynamics analysis methods to establish a timing drive system model for a diesel engine, analyzing the dynamic tension of the synchronous belt and its vibration characteristics under the influence of crankshaft speed fluctuations [8]. Yang Chunyu et al. employed a method combining dynamic modeling and two-stage parameter identification to establish an energy model and online identification framework for belt conveyors driven by permanent magnet synchronous motors, analyzing the accuracy of the energy model and the effectiveness of the parameter identification method [9].
The aforementioned studies rarely focus on the automotive steering gear field and lack in-depth analysis of the influence of different pre-tension levels on the vibration modal characteristics of synchronous belts. This paper takes the steering gear synchronous belt as the research object, applies pre-tension using the displacement loading method, conducts prestressed modal simulation analysis to reveal the influence law of pre-tension on natural frequencies and mode shapes, and validates the effectiveness of the established model through experiments.
2. Construction of the numerical simulation model
2.1. Research object and geometric modeling
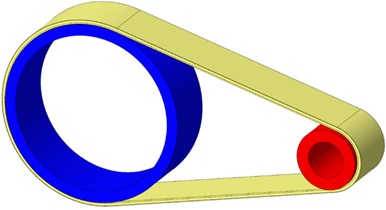
The steering gear synchronous belt-pulley system was selected as the research object. Its core structural parameters are as follows: large pulley inner diameter 64 mm, outer diameter 72.98 mm, width 23.5 mm; small pulley inner diameter 14.935 mm, outer diameter 24.59 mm, width 26.5 mm; pulley center distance 100 mm; synchronous belt width 22 mm, featuring a three-layer structure of nylon (outer layer 0.2 mm) – EPDM rubber (middle layer 1 mm) – EPDM rubber (inner layer 0.5 mm). Considering that the tooth dimensions are much smaller than the overall belt dimensions and have minimal impact on modal characteristics while increasing meshing difficulty, the belt teeth were simplified into layers of uniform thickness. This simplification maintains model realism while improving computational efficiency. The 3D geometric model was created using SolidWorks, as shown in Fig. 1.
Fig. 1Synchronous belt-pulley system assembly model
2.2. Meshing and material parameters
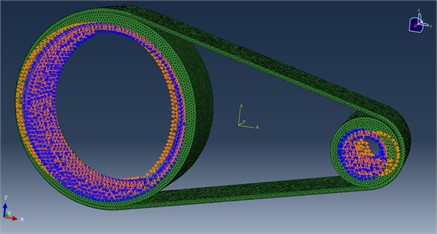
Hypermesh was used for meshing, integrating the three layers of the synchronous belt to ensure coordinated layered deformation. Second-order tetrahedral elements (C3D10) were selected. The mesh size was set to 1 mm, with refinement applied to areas of high curvature such as pulley rims and belt edges, achieving a minimum mesh size of 0.2 mm and a feature angle of 30°. Mesh quality verification results showed element distortion less than 5 %, aspect ratio less than 3, and warpage less than 10°, meeting the precision requirements for Abaqus simulations. The final model consisted of 387,589 elements and 579,098 nodes. The finite element model of the synchronous belt-pulley system is shown in Fig. 2.
Fig. 2Synchronous belt-pulley system FEM model
Based on the steering gear synchronous belt technical manual and related literature, the material parameters for each component were determined, as listed in Table 1.
Table 1Mechanical parameters of materials
Material | Density (kg/m3) | Elastic modulus (MPa) | Poisson’s ratio | Structural damping factor |
Steel | 7.8×103 | 2.1×105 | 0.3 | 0.005 |
Material | 1.0×103 | 8 | 0.47 | 0.3 |
Steel | 1.15×103 | 2.5×10³ | 0.35 | 0.1 |
2.3. Boundary conditions and pre-tension application
Boundary conditions were set according to the actual working state of the synchronous belt drive: five degrees of freedom (displacements in and directions, and rotations about , , and axes) were constrained on the inner sides of the large and small pulleys. The translational degree of freedom along the line connecting the pulley centers (-axis direction) was retained to apply pre-tension displacement. The synchronous belt and pulleys were connected via a tied contact constraint on shared surfaces to ensure coordinated motion. A schematic of the boundary conditions is shown in Fig. 3.
Fig. 3Schematic diagram of boundary conditions and load settings
Pre-tension was applied using the displacement loading method: displacement was applied to the large pulley in the – direction and to the small pulley in the + direction, with the total pre-tension displacement being the sum of both. Two loading schemes were compared: Scheme 1: fixing the large pulley and applying 2 mm displacement to the small pulley; Scheme 2: applying 1 mm displacement to each pulley. Calculation results showed that the difference in natural frequencies and mode shapes between the two schemes was less than 0.5 %. Therefore, Scheme 2 was adopted for subsequent calculations to apply pre-tension, ensuring more uniform force distribution on the synchronous belt, which better aligns with engineering practice.
3. Results and discussion
3.1. Modal characteristics analysis
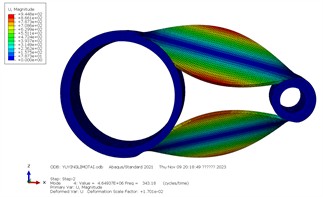
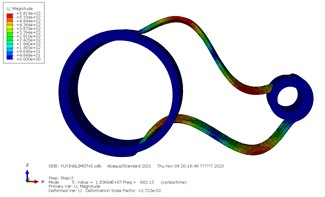
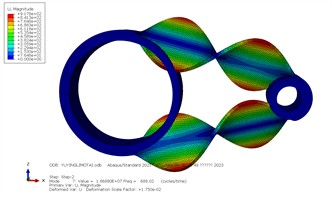
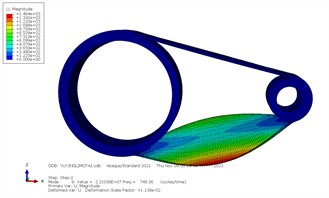
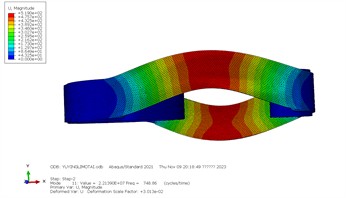
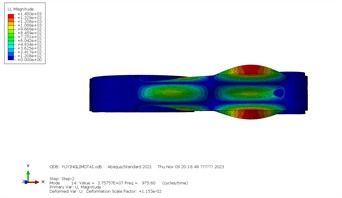
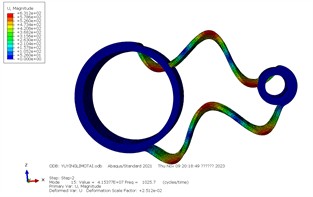
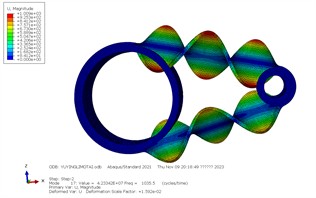
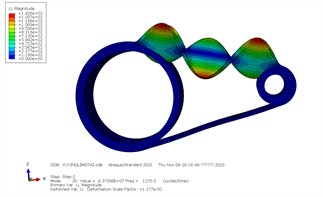
Prestressed modal analysis yielded the first 10 natural frequencies and mode shape characteristics of the system, as shown in Fig. 4. Fig. 4 shows that the first 10 natural frequencies range from 340.69 Hz to 1270.5 Hz. Low-order modes are dominated by overall vertical bending and torsion: the 1st mode (340.69 Hz) is an overall vertical bending mode, with the synchronous belt bending symmetrically along the -axis; the 2nd mode (343.18 Hz) is an overall torsional mode, with the synchronous belt twisting about the -axis and the pulleys at both ends twisting in opposite directions. Medium- and high-order modes exhibit combined mode shapes and localized vibration features.
3.2. Influence of pre-tension on modal characteristics
Pre-tension displacements of 2 mm, 3 mm, and 4 mm were set, and the corresponding natural frequencies were obtained through simulation, as shown in Table 2. Table 2 indicates that increasing pre-tension significantly elevates the natural frequencies across all orders, showing an approximately linear relationship with pre-tension displacement. When the pre-tension displacement increased from 2 mm to 4 mm, the first-order natural frequency increased by 36.5 %.
Table 2First three natural frequencies under different pre-tension displacements
Pre-tension displacement (mm) | 1st order frequency (Hz) | 2nd order frequency (Hz) | 3rd order frequency (Hz) |
2 | 340.69 | 343.18 | 682.13 |
3 | 409.25 | 412.36 | 821.57 |
4 | 464.88 | 468.52 | 947.32 |
4. Validation of model effectiveness
Experimental modal analysis was conducted to validate the model’s effectiveness. The experimental setup included an M+P testing system, acceleration sensors, an exciter, and a laser vibrometer. An experimental platform was built according to the simulation parameters, applying a 2 mm pre-tension displacement. Random excitation was used to excite the system, response signals were collected, and modal parameters were identified. The experimentally measured first six natural frequencies and their comparison with simulation results are shown in Table 3. Table 3 shows that the relative errors are all less than 1 %, indicating that the established finite element model can accurately predict the modal characteristics of the synchronous belt system.
Table 3Comparison of simulation and experimental results
Order | Simulation frequency (Hz) | Experimental frequency (Hz) | Relative error (%) |
1 | 340.69 | 338.5 | 0.65 |
2 | 343.18 | 341.2 | 0.58 |
3 | 682.13 | 679.8 | 0.34 |
4 | 688.02 | 686.4 | 0.24 |
5 | 748.26 | 746.3 | 0.26 |
6 | 759.92 | 757.7 | 0.29 |
5. Conclusions
This study established a three-dimensional finite element model of a steering gear synchronous belt-pulley system, applied pre-tension using the displacement loading method, conducted prestressed modal simulation and experimental validation, and revealed the influence law of pre-tension on modal characteristics.
Fig. 4First ten order mode shapes
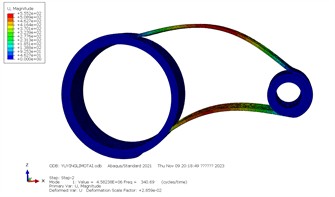
a) First-order
b) Second-order
c) Third-order
d) Fourth-order
e) Fifth-order
f) Sixth-order
g) Seventh-order
h) Eighth-order
i) Ninth-order
j) Tenth-order
The main conclusions are as follows:
1) The proposed modeling method is reliable, and the finite element model demonstrates high prediction accuracy. The relative error between simulation and experimental results is less than 1 %, making it efficient for analyzing the modal characteristics of synchronous belts.
2) The first 10 natural frequencies of the synchronous belt system range from 340.69 Hz to 1270.5 Hz. Low-order modes are dominated by overall vertical bending and torsion, while medium- and high-order modes exhibit combined mode shapes and localized vibration features.
3) Increasing pre-tension significantly elevates the natural frequencies across all orders, showing an approximately linear relationship with pre-tension displacement, while having minimal impact on mode shape morphology.
References
-
J. Chen, J. Ye, Y. Wang, X. Sun, X. Xia, and X. He, “Design, modeling and experiment of a novel synchronous belt drive with noncircular pulleys,” Iranian Journal of Science and Technology, Transactions of Mechanical Engineering, Vol. 44, No. 3, pp. 533–542, May 2019, https://doi.org/10.1007/s40997-019-00297-w
-
Q. Hu, J. Hou, D. Sun, and J. Guo, “Dynamic performance of engine timing transmission system with RU type synchronous belt,” Journal of Mechanical Engineering, Automation and Control Systems, Vol. 2, No. 2, pp. 109–124, Dec. 2021, https://doi.org/10.21595/jmeacs.2021.22178
-
Z. Ge, M. Zhao, S. Li, and Z. Wang, “Dynamic model research and testing system design of the intermittent transfer device on high-speed synchronous belt,” in 2nd Information Technology, Networking, Electronic and Automation Control Conference (ITNEC), pp. 481–485, Dec. 2017, https://doi.org/10.1109/itnec.2017.8284778
-
J. Guo, Q. Meng, X. Yu, and Q. Hu, “Study on Dynamic load characteristics of circular arc tooth synchronous belt based on RecurDyn,” in International Conference on Mechatronics, Electronic, Industrial and Control Engineering, Jan. 2015, https://doi.org/10.2991/meic-15.2015.265
-
Y. Wang, H. Liu, H. Liu, and J. Zhao, “Dynamic analysis and system identification of a synchronous belt mechanism driven by PMSM,” in 3rd IEEE International Conference on Control Science and Systems Engineering (ICCSSE), pp. 364–368, Aug. 2017, https://doi.org/10.1109/ccsse.2017.8087958
-
H. Shi, C. Shi, and Z. Li, “Application research on adaptive control method of variable frequency tensioning system for large belt conveyor,” in Advances in Transdisciplinary Engineering, IOS Press, 2024, https://doi.org/10.3233/atde240271
-
W. Li, X. Zhang, Y. Shang, Q. Chen, C. Chen, and Z. Xin, “Investigation of dynamic heat generation and transfer behavior and energy dissipation for nonlinear synchronous belt transmission,” Applied Thermal Engineering, Vol. 144, pp. 457–468, Nov. 2018, https://doi.org/10.1016/j.applthermaleng.2018.08.080
-
Y. M. Li, Z. Y. Hao, and J. Li, “Analysis and research of dynamic characteristics of synchronous belt of a diesel using multi-body dynamics,” Applied Mechanics and Materials, Vol. 97-98, pp. 721–725, Sep. 2011, https://doi.org/10.4028/www.scientific.net/amm.97-98.721
-
C. Yang, L. Bu, and B. Chen, “Energy modeling and online parameter identification for permanent magnet synchronous motor driven belt conveyors,” Measurement, Vol. 178, p. 109342, Jun. 2021, https://doi.org/10.1016/j.measurement.2021.109342
About this article

This research was funded by the National Natural Science Foundation of China (52405275), Natural Science Foundation of the Higher Education Institutions of Jiangsu Province, China (24KJB460017).
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
The authors declare that they have no conflict of interest.
