Abstract
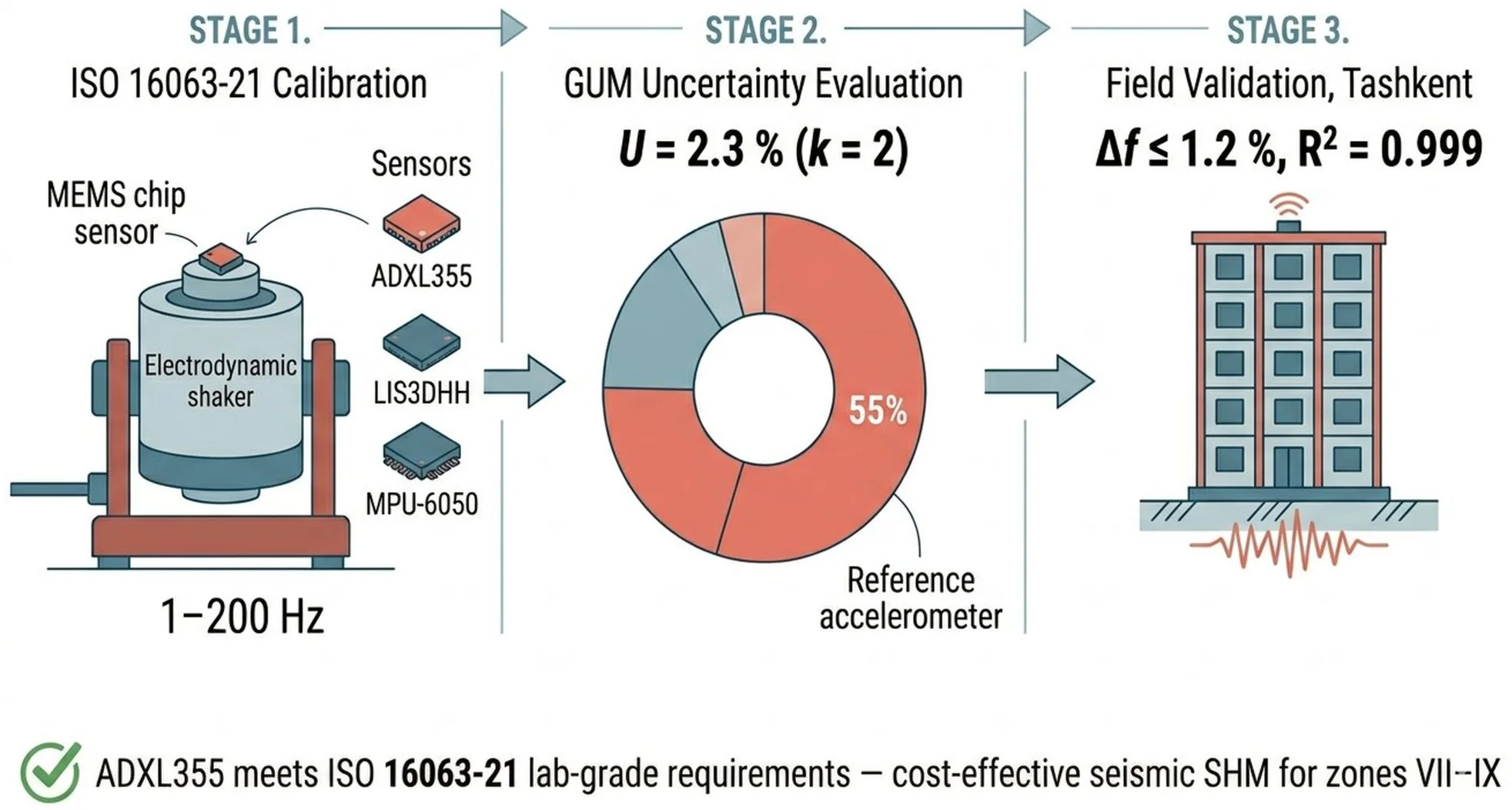
This study presents a metrological assurance framework for MEMS accelerometers used in structural health monitoring (SHM) of buildings in seismically active regions. The methodology integrates ISO 16063-21 calibration, JCGM 100 (GUM) uncertainty evaluation, and field validation. Three MEMS accelerometers (ADXL355, MPU-6050, LIS3DHH) were calibrated across 1-200 Hz at 0.1-1.0 g. The expanded uncertainty ( 2) ranged from 2.3 % to 5.8 %. Field validation on a five-story building in Tashkent confirmed that the ADXL355 estimates natural frequencies within 1.2 % of a reference accelerometer ( 0.999). The ADXL355 satisfies ISO 16063-21 requirements and provides adequate performance for seismic zones VII-IX. The proposed framework contributes to standardized low-cost vibration monitoring procedures in Central Asia.
Highlights
- Three MEMS accelerometers calibrated per ISO 16063-21 across 1–200 Hz at 0.1–1.0 g
- ADXL355 achieved expanded uncertainty of 2.3 % (k = 2) at 50 Hz
- GUM-based uncertainty budget identifies reference accelerometer as dominant contributor (55 %)
- Field validation confirms natural frequency agreement within 1.2 % (R² = 0.999)
- Low-cost MEMS sensors shown adequate for seismic SHM in zones VII–IX
1. Introduction
Uzbekistan is situated in one of the most seismically active zones of Central Asia, with earthquakes of intensity VII-IX documented on the MSK-64 scale [1]. The highest seismic hazard is concentrated in the Tashkent, Fergana Valley, and Surkhandarya regions, where historical events – including the 1966 Tashkent earthquake (M 5.1) and recent seismic activity near Gazalkent – have caused widespread structural damage [14]. The Government has intensified seismic safety through the 2021 Law “On Ensuring Seismic Security”, a 2022 presidential decree mandating continuous monitoring [2], and a 2025 decree introducing AI-based seismic data analysis [3]. Structural health monitoring (SHM) is central to these efforts, enabling real-time assessment of building dynamic response through vibration-based techniques [4]. Low-cost MEMS accelerometers have made it feasible to instrument large numbers of structures [5, 6, 15].
However, MEMS metrological reliability for SHM remains underexplored. Consumer-grade sensors exhibit higher noise floors, temperature-dependent drift, and cross-axis coupling compared to piezoelectric accelerometers [7]. Without calibration and uncertainty quantification, SHM data may yield erroneous assessments [8]. ISO 16063-21 provides a calibration framework [9], yet few studies have applied it to MEMS sensors for seismic SHM under Central Asian conditions.
This paper presents a metrological framework addressing three objectives: (1) calibration methodology adapted from ISO 16063-21 for low-cost MEMS sensors; (2) uncertainty quantification across 1-200 Hz; and (3) assessment of commercially available MEMS accelerometers for SHM in seismic zones VII-IX. Unlike previous studies that address MEMS calibration or SHM separately, this work integrates ISO 16063-21-compliant calibration, GUM-based uncertainty budgeting, and in-situ field validation within a single framework tailored for seismic SHM in Central Asia.
2. Materials and methods
2.1. Sensors under test
Three MEMS accelerometers were selected: the Analog Devices ADXL355 (±2 g, 25 μg/√Hz noise density), the InvenSense MPU-6050 (±2-±16 g, 400 μg/√Hz), and the STMicroelectronics LIS3DHH (±2.5 g, 45 μg/√Hz) [10, 11]. Each was interfaced with a Raspberry Pi 4B at 500 Hz sampling rate.
2.2. Calibration setup
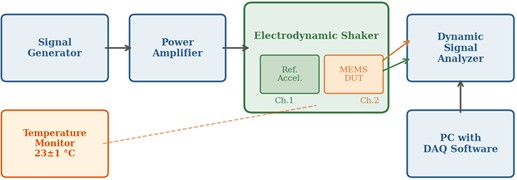
Calibration followed the comparison method of ISO 16063-21 [9] using an electrodynamic shaker (B&K Type 4808), a reference accelerometer (B&K Type 8305, 0.5 %, 2), a signal generator, and dual-channel dynamic signal analyzer. Sinusoidal excitation was applied at 20 frequencies from 1 to 200 Hz at 0.1, 0.5, and 1.0 g, averaged over 10 cycles per point. The setup is shown in Fig. 1.
Fig. 1Schematic diagram of the calibration system based on ISO 16063-21
2.3. Uncertainty evaluation
Uncertainty was evaluated per JCGM 100 (GUM) [12]. The combined standard uncertainty includes: reference accelerometer (), repeatability (), temperature (), table stability (), signal processing (), and ADC digitization (). The temperature uncertainty 0.26 % was derived from the manufacturer datasheet thermal sensitivity coefficient (0.02 %/°C) and the ±1 °C laboratory variation (rectangular distribution). The signal processing uncertainty 0.17 % accounts for windowing effects (Hanning window leakage), FFT frequency resolution (0.5 Hz bin width at 500 Hz sampling rate), and amplitude averaging over 10 cycles. Expanded uncertainty U was obtained with 2 (95 % confidence).
2.4. Field validation
The ADXL355 was deployed on a five-story reinforced concrete building in Tashkent (seismic zone VIII) [1]. Ambient vibration over 72 hours was compared with a Kinemetrics EpiSensor ES-T using operational modal analysis via frequency domain decomposition.
3. Results and discussion
3.1. Calibration results
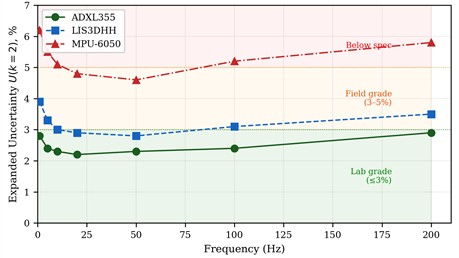
Fig. 2 presents sensitivity deviation versus frequency at 0.5 g. The ADXL355 maintained deviations below ±1.5 %, while the LIS3DHH reached ±2.8 % at low frequencies and the MPU-6050 showed deviations up to 4.7 %. The MPU-6050 was tested at ±2 g range; its higher deviations stem from the elevated noise floor (400 μg/√Hz versus 25 μg/√Hz for ADXL355) and limited on-chip temperature compensation. Sensitivity deviations at 0.1 g and 1.0 g remained within ±0.3 % of the 0.5 g values, confirming adequate linearity. Cross-axis sensitivity was not separately quantified in this study; however, the comparison method of ISO 16063-21 inherently captures combined on-axis and off-axis effects within the reported uncertainty budget. Dedicated cross-axis characterization is planned for future work. Numerical data are given in Table 1.
Fig. 2Sensitivity deviation versus frequency for three MEMS accelerometers at 0.5 g. Shaded region: ±2 % tolerance
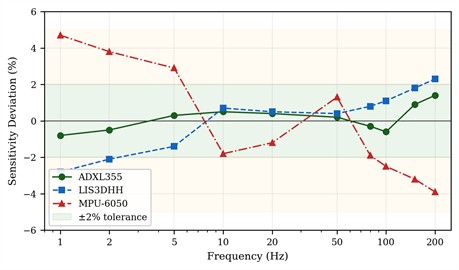
Table 1Calibration results at selected frequencies (0.5 g, 23 ± 1 °C)
Frequency, Hz | ADXL355, % | LIS3DHH, % | MPU-6050, % |
1 | –0.8 | –2.8 | +4.7 |
10 | +0.5 | +0.7 | –1.8 |
50 | +0.2 | +0.4 | +1.3 |
100 | -0.6 | +1.1 | –2.5 |
200 | +1.4 | +2.3 | –3.9 |
3.2. Uncertainty budget
Table 2 and Fig. 3 present the uncertainty budget for the ADXL355 at 50 Hz. The reference accelerometer was the dominant contributor (~55 %), consistent with prior findings [13].
Table 2Uncertainty budget for ADXL355 at 50 Hz
Component | Value, % | Distribution | Contribution, % |
Ref. accel. () | 0.50 | Normal | 55.0 |
Repeatability () | 0.22 | Normal | 10.7 |
Temperature () | 0.26 | Rectangular | 14.9 |
Table stability () | 0.24 | Rectangular | 12.7 |
Signal proc. () | 0.17 | Normal | 6.4 |
ADC () | 0.05 | Rectangular | 0.6 |
The expanded uncertainty was 2.3 % for the ADXL355, 3.1 % for the LIS3DHH, and 5.8 % for the MPU-6050 (Fig. 4). The ADXL355 satisfies laboratory-grade requirements (≤ 3 %) per ISO 16063-21 [9].
Fig. 3Uncertainty contribution breakdown for ADXL355 at 50 Hz
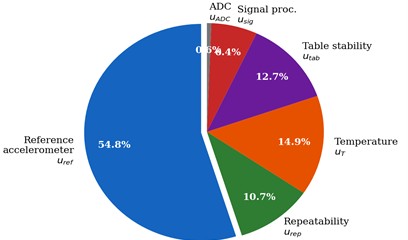
Fig. 4Expanded uncertainty U (k= 2) versus frequency with ISO 16063-21 grade thresholds
3.3. Field validation
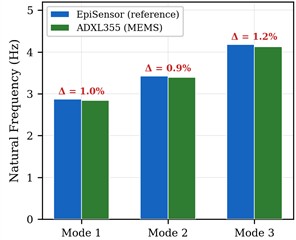
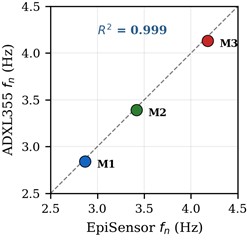
Fig. 5 presents the field validation. The first three natural frequencies showed differences of 1.0 %, 0.9 %, and 1.2 % between EpiSensor and ADXL355 ( 0.999). Since frequency shifts exceeding 5-10 % indicate structural damage [4], the ~1 % discrepancy confirms MEMS adequacy for SHM. The ADXL355 node cost (~50-100 USD) is two orders of magnitude below conventional accelerometers, supporting cost-effective seismic monitoring [3]. The 72-hour validation period does not capture long-term drift; periodic recalibration is recommended for permanent installations.
Fig. 5Field validation: a) natural frequencies from reference and MEMS sensors; b) correlation (R2= 0.999)
a) Modal frequencies
b) Correlation
4. Conclusions
A metrological framework for MEMS accelerometers in seismic SHM has been presented. The ADXL355 achieved expanded uncertainty of 2.3 % ( 2), with combined standard uncertainty 0.67 % at 50 Hz, satisfying ISO 16063-21. Field validation showed that the ADXL355 estimated the first three natural frequencies as 3.42 Hz, 9.87 Hz, and 17.63 Hz, differing from the EpiSensor reference by 0.04 Hz, 0.09 Hz, and 0.21 Hz respectively. The reference accelerometer calibration contributed 0.50 % to the combined variance (the largest single component at 55.0 %), suggesting that national traceability improvements would yield the greatest quality gains. Future work will extend the calibration to 0.1-500 Hz, investigate long-term drift, and develop automated uncertainty propagation for continuous SHM.
References
-
M. Albayrak, M. T. Özlüdemir, M. M. Aref, and K. Halicioglu, “Determination of Istanbul geoid using GNSS/levelling and valley cross levelling data,” Geodesy and Geodynamics, Vol. 11, No. 3, pp. 163–173, May 2020, https://doi.org/10.1016/j.geog.2020.01.003
-
“On measures to further improve the seismic safety system,” Decree of the President of the Republic of Uzbekistan No. 144, May 2022.
-
“On additional measures to ensure seismic safety and effectiveness of work in seismology,” Decree of the President of the Republic of Uzbekistan, Oct. 2025.
-
C. R. Farrar and K. Worden, Structural Health Monitoring: A Machine Learning Perspective. John Wiley & Sons, 2013.
-
M. Esposito et al., “Low-cost MEMS accelerometers for earthquake early warning systems: A dataset collected during seismic events in central Italy,” Data in Brief, Vol. 53, p. 110174, Apr. 2024, https://doi.org/10.1016/j.dib.2024.110174
-
K. Özdemir and A. Kömeç Mutlu, “Cost-effective data acquisition systems for advanced structural health monitoring,” Sensors, Vol. 24, No. 13, p. 4269, Jun. 2024, https://doi.org/10.3390/s24134269
-
S. Komarizadehasl, F. Lozano, J. A. Lozano-Galant, G. Ramos, and J. Turmo, “Low-cost wireless structural health monitoring of bridges,” Sensors, Vol. 22, No. 15, p. 5725, Jul. 2022, https://doi.org/10.3390/s22155725
-
Z. Liu, “Smart sensors for structural health monitoring and nondestructive evaluation,” Sensors, Vol. 24, No. 2, p. 603, Jan. 2024, https://doi.org/10.3390/s24020603
-
“Calibration of vibration transducers – Part 21,” ISO, ISO 16063-21:2003, 2003.
-
“ADXL355 Low Noise 3-Axis MEMS Accelerometer,” Analog Devices, 2020.
-
“LIS3DHH High-resolution 3-axis digital accelerometer,” STMicroelectronics, 2019.
-
“Guide to the expression of uncertainty in measurement (GUM),” JCGM 100:2008, 2008.
-
B. Khamdamov, A. Satvoldiyev, and K. Vasiev, “Improved evaluation of measurement uncertainty and traceability in vibrometer calibration systems,” Vibroengineering Procedia, Vol. 60, pp. 486–492, Dec. 2025, https://doi.org/10.21595/vp.2025.25675
-
V. A. Ismailov, S. I. Yodgorov, A. S. Khusomiddinov, E. M. Yadigarov, A. S. Botirovich, and B. U. Aktamov, “New classification of soils by seismic properties for the building code in Uzbekistan,” Geomechanics and Geoengineering, Vol. 19, No. 4, pp. 605–625, Jul. 2024, https://doi.org/10.1080/17486025.2023.2296975
-
M. Petrenko and A. Vershovskii, “Towards a practical implementation of a single-beam all-optical non-zero-field magnetic sensor for magnetoencephalographic complexes,” Sensors, Vol. 22, No. 24, p. 9862, Dec. 2022, https://doi.org/10.3390/s22249862
About this article

The authors have not disclosed any funding.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
The authors declare that they have no conflict of interest.
