Abstract
With advances in robotics and communications engineering, robots are replacing humans in a variety of jobs. In military applications, the control problem of the robot formation, a major part of unmanned combat platforms, has also become a focus of research. This paper proposes constrained following control to solve the problem of collision avoidance, following and reaching in robot formation systems. First, the state space equations of robot formations are established based on the U-K theory. Second, the collision avoidance following constraint of the system is transformed into an approximate following constraint, and the constrained following error is established. The arrival constraint is added to provide the destination of the formation. Third, the adaptive robust controller is proposed to solve the potential complex uncertainty interference of systems. Uniformly bounded and uniformly ultimately bounded of the constraint following error are guaranteed. Finally, the effectiveness of the controller is verified by simulation experiments.
1. Introduction
Unmanned combat platforms are a class of robotic systems carrying weapons for combat missions that can be controlled by pre-programmed or operated remotely [1]. It reduces casualties and improves combat efficiency through its high mobility, low cost, difficult detection, and long endurance. As one of the main directions for building intelligent weapons platforms, it has become a popular research topic for all major military powers. To improve the efficiency of unmanned combat platforms in battlefield material transportation, reconnaissance, personnel search and rescue, and field operations, an unmanned combat formation platform based on robot formation is proposed. In recent years, several scholars have proposed methods to address the following control [2] and avoidance control [3] of robot formations on the battlefield. However, they ignore the simultaneous nature of following and avoidance in actual combat. In other words, the robots in the formation are required to perform target tracking while keeping the distance between robots within a safe range. The difficulty of the following and avoidance control of robot formations increases due to the complex uncertainty in the battlefield environment.
In the study of control of uncertain systems, Udwadia and Kalaba proposed a control strategy for uncertain mechanical systems. Chen [4] categorized the traditional stability control, trajectory tracking control and optimization control as servo-constrained control based on U-K theory, and applied constrained following control to these situations. Xu [5] applied constraint following control to fuzzy mechanical systems, proposed an index considering control cost and effectiveness, and transformed the gain design of the adaptive method into a constrained optimization problem.
The above study shows the applicability of approximate constraint following methods for the control of uncertain mechanical systems. This paper converts the collision avoidance, following, and arrival control of the robot formation system into an approximate constrained following problem. By designing an adaptive robust control, the constrained following error of the system can be uniformly bounded and uniformly ultimately bounded under the complex uncertainty. The robot formations can achieve the expected performance and have been verified by simulation experiments.
2. Modeling of constrained mechanical systems with uncertainty
An -dimensional mechanical system can be described as [6]:
where is the time, is the displacement, is the velocity, is the acceleration respectively. is the control input. is uncertain of the system. is compact but unknown, and . is the inertia matrix, is the Coriolis/centrifugal force matrix, is the gravitational force and are other interfering forces.
Considering the constraint equations followed by the system, the first-order form is:
where , . is the th component of . Assuming, , then:
The second-order derivative of Eq. (2) with respect to is:
Similarly, let , we have:
Then, the constraint following error is defined as:
Therefore, the control objective changes from , to by constraint following analysis.
Considering the distance relationship between robots in the formation:
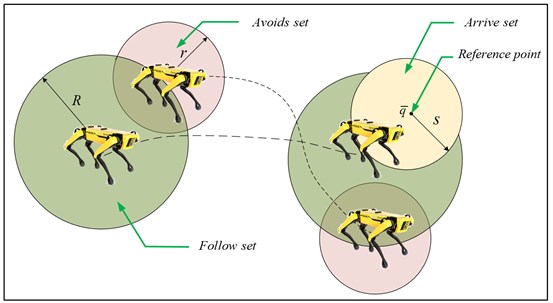
The following sets are defined to guarantee collision avoidance and following performance of the robot:
where , represent the following-signal transmission radius and the safety distance between robots, respectively. Defining:
Taking the first derivative of :
Considering Eq. (6), let:
For this typical control following system, defining the following error is:
where , are the radius and the circle center of the arrival area. Differentiating Eq. (12) with respect to yields:
According to equation Eq. (6), let:
where is a constant.
With the above analysis, the original constraints on collision avoidance, following and arrival in the system are transformed into approximate following constraints.
3. Adaptive robust control design
The matrix of Eq. (1) is decomposed to express the uncertainty explicitly:
For later analysis, let , , and . Let:
is used to control the deterministic part of the system to approach the constrained. is used to enable the system close to the constrained quickly. Continued design is necessary to overcome the uncertainty of the system.
Assumption 1: (1) For each , the function meets:
and (iii) non-decreasing with respect to each component of its argument . can be linearly factorized with respect to , we have:
Recalling Eq. (6), the adaptive law is proposed:
where , is adaptive design parameters. An adaptive control term is defined as follows:
where:
And is a scalar constant. Let the system control input as:
4. Simulations
Fig. 1 presents the robot formation system, its state space equation can be expressed as:
According to the design objective, the distance between two robots should satisfy the following conditions:
Recalling Eq. (7), let . Taking it to Eq. (9):
Taking the second derivative of time:
Fig. 1Diagram of robot formation
Considering arrival constraints, let , combining Eqs. (12) and (13) we obtain:
The derivative of the time for Eqs. (28) and (29) yields:
According to Eqs. (26)-(31), we can obtain , ,
Some structural parameters of the system are given:
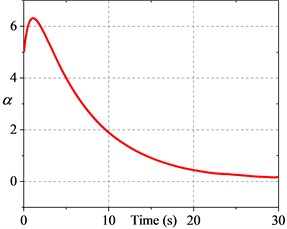
Fig. 2 presents the errors of the system and they converge to zero after a period of time. Fig. 3 illustrates that the distance between robots is difficult to maintain within the desired range when collision avoidance and following constraints are not considered. Fig. 4 shows the variation of the adaptation parameter.
Fig. 2History of constraint-following error β
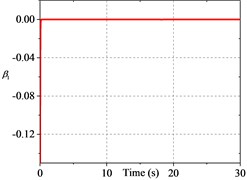
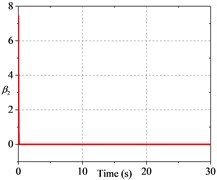
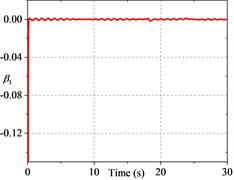
Fig. 3Performance comparison
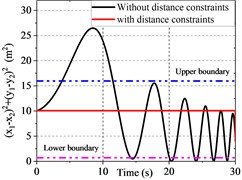
a) Distance between robots
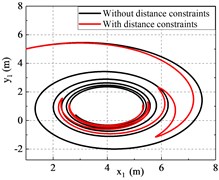
b) Trajectory of robot 1
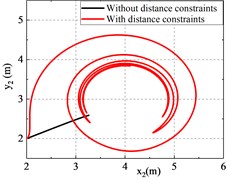
c) Trajectory of robot 2
Fig. 4History of the adaptive parameter
5. Conclusions
This paper presents the collision-following-arrival problem for an unmanned combat platform system based on robot formations. The original constraint is transformed into an approximate following constraint. After that, adaptive robust controllers are designed to cope with the complex uncertainties in the system and drive the system to achieve the desired performance. The main contributions of this paper are the following three points: (1) a more practical formation control problem is proposed by combining the collision avoidance, following and arrival problems of uncertain robot formation systems; (2) an adaptive robust control method is proposed to solve the impact of complex uncertainties on unmanned combat platforms on the battlefield and improve the stability of platform operation; (3) a theoretical reference is provided for robot formation control.
References
-
D. Shen et al., “An orbital emulator for pursuit-evasion game theoretic sensor management,” in SPIE Defense + Security, Vol. 10196, pp. 122–131, May 2017, https://doi.org/10.1117/12.2266606
-
S. A. Ajwad, E. Moulay, M. Defoort, T. Menard, and P. Coirault, “Collision-free formation tracking of multi-agent systems under communication constraints,” 2021 American Control Conference (ACC), Vol. 5, No. 4, pp. 1345–1350, May 2021, https://doi.org/10.23919/acc50511.2021.9482618
-
D. Shen, K. Pham, E. Blasch, H. Chen, and G. Chen, “Pursuit-evasion orbital game for satellite interception and collision avoidance,” in SPIE Defense, Security, and Sensing, Vol. 8044, No. 7, pp. 284–287, May 2011, https://doi.org/10.1117/12.882903
-
Y.-H. Chen, “Constraint-following servo control design for mechanical systems,” Journal of Vibration and Control, Vol. 15, No. 3, pp. 369–389, Mar. 2009, https://doi.org/10.1177/1077546307086895
-
J. Xu, Y.-H. Chen, and H. Guo, “A new approach to control design for constraint-following for fuzzy mechanical systems,” Journal of Optimization Theory and Applications, Vol. 165, No. 3, pp. 1022–1049, Jun. 2015, https://doi.org/10.1007/s10957-014-0604-9
-
R. M. Rosenberg and W. E. Schmitendorf, “Analytical dynamics of discrete systems,” Journal of Applied Mechanics, Vol. 45, No. 1, pp. 233–234, Mar. 1978, https://doi.org/10.1115/1.3424263
About this article

