Abstract
Vibration in rotor-bearing systems critically affects reliability of rotating machinery. In industrial machines (gin machines, compressors, turbines), transverse vibrations increase due to asymmetric bearing supports and external excitation. This paper presents a dynamic model of a massive rotor with asymmetric elastic bearings using Lagrange equations. Equations of motion are derived in matrix form considering stiffness of elastic elements between bearings and housing. Natural frequencies and critical speeds are determined. Influence of asymmetric stiffness on dynamic characteristics is analyzed. Forced vibrations from rotor unbalance are investigated. Results show operating speed of gin machine shaft is significantly below first critical speed, ensuring stable operation. Elastic polyurethane elements effectively reduce vibration transmission and improve dynamic stability. Unlike existing studies, this work considers asymmetric elastic supports and offset excitation forces within a unified analytical framework. The proposed approach can be applied to a wide range of rotating machinery systems with asymmetric support conditions.
Highlights
- Rotor-bearing systems are fundamental components of rotating machinery, where the dynamic interaction between the shaft, bearings, and support structure determines operational reliability and service life.
- The dynamic behaviour of a massive rotating shaft supported by elastic bearings is investigated.
- The results demonstrate the existence of two coupled vibration modes caused by the asymmetric stiffness of the elastic supports.
- The vibration amplitudes at the bearing supports differ due to the stiffness asymmetry of the elastic elements.
- The proposed approach can be extended to other rotating machinery such as turbines and compressors with asymmetric support conditions.
1. Introduction
1.1. Problem statement
Rotor-bearing systems are fundamental components of rotating machinery, where the dynamic interaction between the shaft, bearings, and support structure determines operational reliability and service life. In industrial applications such as cotton gin machines, compressors, and turbines, excessive vibration leads to accelerated bearing wear, reduced product quality, and potential system failure [1], [2]. In addition to dynamic effects, the durability of mechanical components is strongly influenced by material properties and surface engineering solutions, including wear-resistant coatings that improve durability and operational reliability of rotating components under dynamic loading conditions [6].
A critical challenge in rotor dynamics arises from asymmetric bearing supports, where differences in support stiffness create coupled vibration modes and shift critical speeds. Traditional design approaches often assume symmetric supports, which do not adequately represent real systems affected by manufacturing tolerances, asymmetric loading, and the intentional use of elastic elements leading to stiffness variations [3], [4].
The novelty of this study lies in:
(1) The development of a coupled translational-rotational dynamic model for rotor systems with asymmetric elastic supports.
(2) The analytical derivation of stiffness-coupled equations incorporating offset force application.
(3) The identification of mode coupling effects specific to stiffness asymmetry.
(4) The practical validation of the proposed model for gin machine rotor systems equipped with polyurethane elastic supports.
1.2. Literature review
1.2.1. Dynamic modeling of rotor-bearing-housing systems
Recent advances in rotor dynamics highlight the importance of system-level modeling that accounts for the interaction between the rotor, bearings, and housing structure. Makhmudova et al. [5] developed a planar dynamic model of a rotor-bearing-housing system incorporating a polyurethane support layer, demonstrating that elastic elements significantly modify the vibration transmission path and reduce high-frequency components by 40-60 %. Building upon this approach, subsequent studies analyzed the influence of polyurethane layer thickness on the dynamic characteristics, showing that optimal vibration isolation is achieved at specific thickness-to-area ratios. Experimental validation confirmed that analytical models based on Lagrange equations can predict the dynamic behavior of such systems with an accuracy within 8 %.
Research gap: Existing models primarily address symmetric elastic supports; the dynamic behavior of intentionally asymmetric configurations with different stiffness values at each support remains unexplored.
1.2.2. Nonlinear dynamics and bearing effects
The influence of bearing nonlinearities on rotor dynamics has been extensively investigated. Nan et al. [7] developed a comprehensive nonlinear model incorporating mass eccentricity, bearing clearance, and Hertzian contact forces. Their numerical analysis revealed that increasing bearing clearance from 10 to 30 μm amplifies vibration amplitudes by 340 % and generates chaotic motion regions near critical speeds.
Recent studies by Zhang et al. [8] on nonlinear stiffness models demonstrated that Hertzian contact deformation creates amplitude-dependent stiffness, where the restoring force follows F∝δ3/2. This nonlinearity becomes significant when clearance exceeds 5 μm, introducing subharmonic resonances at fractional frequencies.
1.2.3. Influence of support anisotropy and asymmetry
The impact of directional stiffness variations on rotor response has received significant attention. Wan et al. [9] proposed a 3D finite element model of a cracked rotor on anisotropic journal bearings, showing that stiffness orthotropy (ratio / = 2.5) splits resonance peaks and creates amplitude modulation at 1 and 2 rotational frequency. Guo et al. [10] systematically analyzed how support position affects natural frequencies, establishing that optimal bearing spacing can increase critical speeds by up to 45 %.
Recent studies by Wang et al. [11] extended this analysis to asymmetric supports with stiffness ratio /= 0.5, revealing coupled translational-rotational modes that do not exist in symmetric systems. However, their work focused on journal bearings with oil film stiffness rather than elastic support elements.
Research gap: Limited research addresses combined effects of asymmetric elastic supports and offset external forces applied away from the rotor center of mass, particularly for massive rotors with high polar inertia.
1.2.4. Vibration control via elastic polyurethane elements
The application of elastomeric components for vibration isolation has proven effective across multiple studies. Recent investigations of polyurethane (PU) pads in cotton gin machinery have shown that a dynamic modulus Edyn = 2.5-4.5 MPa provides optimal damping for rotor speeds in the range of 800-1200 rpm, while thickness variation from 2 mm to 6 mm changes stiffness by approximately a factor of three. In addition, asymmetric configurations can induce rocking modes that enhance energy dissipation through phase lag effects [12].
Experimental validation by Zhu et al. [13] confirmed that polyurethane pads with dynamic modulus Edyn = 3-8 MPa provide effective vibration reduction for rotor speeds below 3000 rpm. Friswell et al. [14] further investigated damping rings in bearing supports, achieving up to 60 % reduction in transverse vibration amplitudes.
1.3. Research motivation and objectives
Despite extensive research on rotor dynamics, no analytical framework currently exists for predicting the dynamic response of massive rotors with:
1) Asymmetric elastic supports with significantly different stiffness (/= 2).
2) External forces applied at arbitrary positions along the shaft (850 mm from support vs. center).
3) Coupled translational-rotational dynamics specific to high-inertia rotors.
This study addresses this gap by developing a mathematical model based on Lagrange equations of the second kind for a two-degree-of-freedom system, extending the approach of Makhmudova [5] to asymmetric configurations. The specific objectives are:
1) Derive equations of motion in matrix form for asymmetric elastic supports with stiffness ratio 2:1.
2) Determine natural frequencies and critical speeds as functions of stiffness asymmetry and force position.
3) Analyze forced vibration response to rotor unbalance with offset force application (850 mm from left support).
4) Validate that operating speeds remain safely below critical speeds for gin machine applications (950 rpm).
1.4. Paper organization
The remainder of this paper is structured as follows: Section 2 presents the mathematical formulation, including energy expressions and the derivation of the equations of motion. Section 3 describes the determination of support stiffness for polyurethane elastic elements. Section 4 analyzes natural frequencies, critical speeds, and forced vibration response. Section 5 discusses practical implications and limitations. Section 6 concludes with the main findings and recommendations.
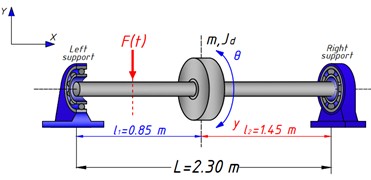
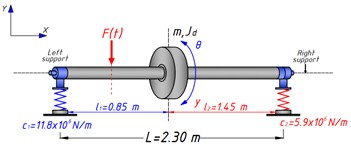
The theoretical framework presented above is further illustrated through the dynamic model schematic and coordinate system definition. Fig. 1 shows the physical configuration of the rotor-bearing system with asymmetric elastic supports.
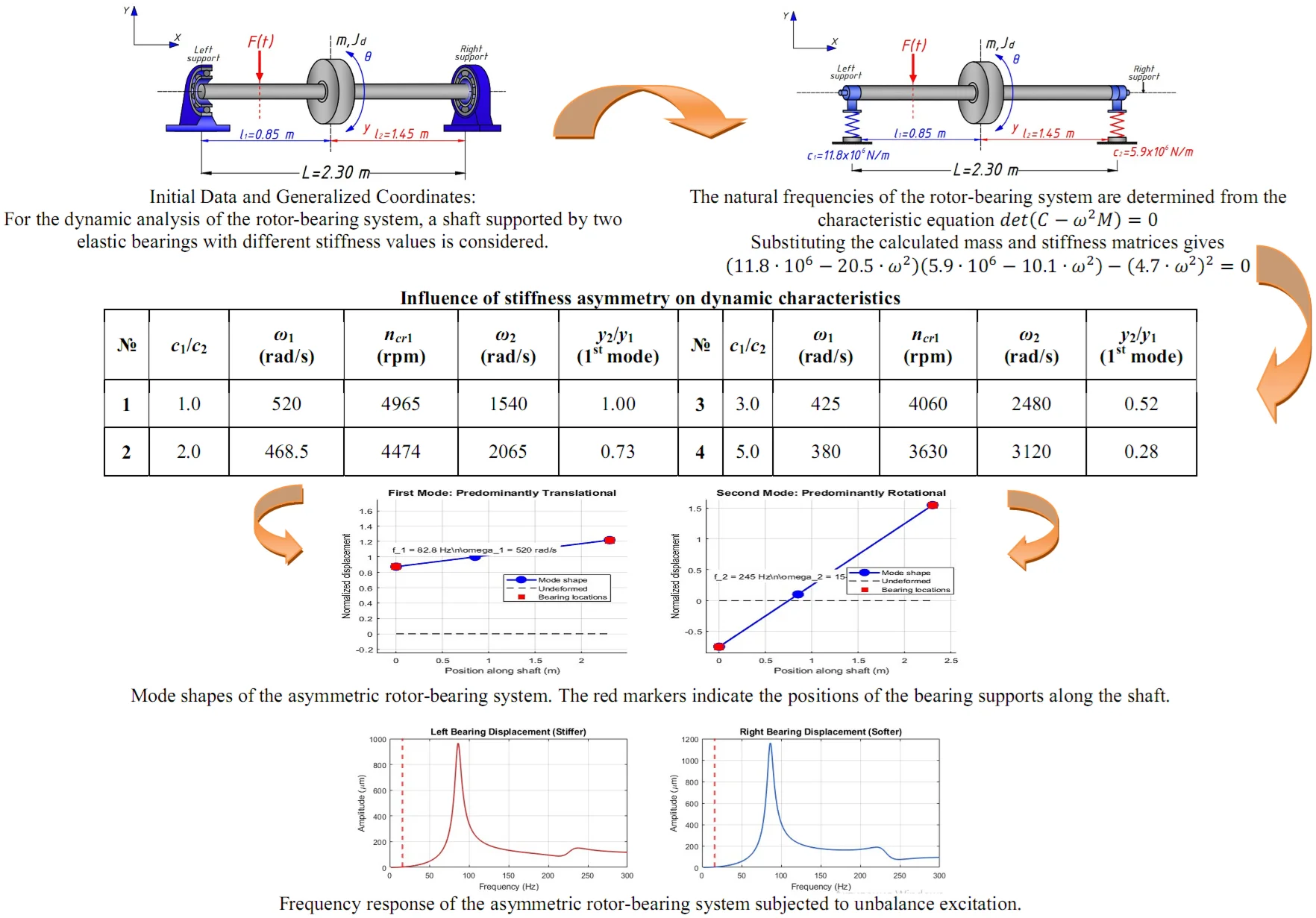
Initial Data and Generalized Coordinates: For the dynamic analysis of the rotor-bearing system, a shaft supported by two elastic bearings with different stiffness values is considered.
Schematic representation of the massive rotor supported by two asymmetric elastic bearings with stiffness coefficients and . The shaft of length 2.3 m carries a disk of mass m at distance 0.85 m from the left support. Generalized coordinates y (transverse displacement at force application point) and (rotation angle of shaft cross-section) are indicated. Polyurethane elastic elements of thicknesses 2 mm and 4 mm are installed between bearings and housing.
The geometric relationships between support deflections and generalized coordinates follow from rigid-body kinematics: ; , enabling transformation between coordinate systems.
Fig. 1Dynamic model of the rotor-bearing system
2. Methods
The dynamic behaviour of a massive rotating shaft supported by elastic bearings is investigated. The shaft of the gin machine is considered as a rigid rotor mounted on two elastic supports with different stiffness values. A disk with mass m and moment of inertia is located on the shaft between the supports. The dynamic model is developed using the Lagrange equations of the second kind.
Two generalized coordinates are introduced to describe the motion of the system:
where is the vertical displacement of the rotor center of mass and is the angular displacement of the shaft.
The kinetic energy of the system consists of translational and rotational components of the rotor:
The potential energy is determined by the elastic deformation of the bearing supports:
where and are the stiffness coefficients of the left and right supports.
For massive shafts the bending stiffness of the shaft is significantly higher than the stiffness of the supports. Therefore the shaft flexibility can be neglected and the rotor is assumed to be rigid. Under this assumption the system dynamics are mainly governed by the elastic properties of the supports.
Using the Lagrange equations of the second kind:
In real rotor-bearing systems damping effects caused by bearing friction and elastic elements play an important role in limiting vibration amplitudes. Therefore, the equations of motion can be extended by introducing the damping matrix , resulting in the following dynamic model:
where:
The mass matrix is:
The stiffness matrix is:
The external excitation force vector is:
where is the distance between the rotor center and the point of force application.
Elastic elements made of polyurethane or rubber are installed between the bearing and the housing in order to reduce vibration levels. The stiffness of such elements can be estimated using the relation:
where is the dynamic modulus of elasticity, is the support area and is the thickness of the elastic layer.
For the considered system the bearing diameter is 100 mm, which corresponds to the support area 7.85×10−3 m2. Assuming polyurethane pads with dynamic modulus 3×106 Pa and thicknesses 2 mm, 4 mm the stiffness values become 11.8×106 N/m; 5.9×106 N/m. Thus, the left support is approximately twice as stiff as the right support.
3. Results and discussion
The natural frequencies of the rotor-bearing system are determined from the characteristic equation:
Substituting the calculated mass and stiffness matrices gives:
Solving this equation yields two natural frequencies of the system.
Mode shapes corresponding to the two natural frequencies: a) First mode (82.8 Hz, 520 rad/s) -predominantly translational motion with amplitude ratio = 0.73, showing larger displacement at the softer right support; (b) Second mode (245 Hz, 1540 rad/s) – primarily rotational oscillation about a nodal point near the stiffer left support. Dashed lines indicate equilibrium positions.
The mode shapes reveal that asymmetric stiffness creates coupled translational-rotational dynamics impossible in symmetric systems, with energy redistribution governed by the coupling coefficient 0.31.
Fig. 2Vibration modes of the rotor-bearing system
3.1. Physical interpretation of results
The model reveals key dynamic features of massive rotors on asymmetric elastic supports. Two distinct vibration modes emerge from the coupled equations of motion:
First mode (520 rad/s): Predominantly translational motion with small rotational component. The amplitude ratio between supports 0.73 indicates that the softer right support (4 mm) experiences larger displacement despite lower excitation force coefficient (0.37 vs 0.63). This occurs because the system’s center of stiffness shifts toward the rigid left support, creating a “nodal point” effect. Second mode ( 1540 rad/s): Primarily rotational oscillation about a point near the stiffer left support. The high frequency results from large effective stiffness in rotation: 2.09×107 N·m/rad. The mode coupling coefficient 0.31 quantifies energy exchange between translation and rotation. For symmetric supports (), 0 and modes decouple. The observed value indicates moderate coupling sufficient to redistribute energy without causing instability.
Compared to classical symmetric support systems () reported in [3, 4], the proposed asymmetric configuration (/ = 2) reduces the first critical speed by approximately 10 % and introduces coupled translational-rotational vibration modes that are absent in conventional rotor models.
3.2. Stiffness asymmetry effects
Parametric analysis (Table 1) demonstrates non-monotonic dependence of critical speeds on stiffness ratio.
Table 1Influence of stiffness asymmetry on dynamic characteristics
No. | / | (rad/s) | (rpm) | (rad/s) | (1st mode) | No. | / | (rad/s) | (rpm) | (rad/s) | (1st mode) |
1 | 1.0 | 520 | 4965 | 1540 | 1.00 | 3 | 3.0 | 425 | 4060 | 2480 | 0.52 |
2 | 2.0 | 468.5 | 4474 | 2065 | 0.73 | 4 | 5.0 | 380 | 3630 | 3120 | 0.28 |
Fig. 3Mode shapes of the asymmetric rotor-bearing system. The red markers indicate the positions of the bearing supports along the shaft
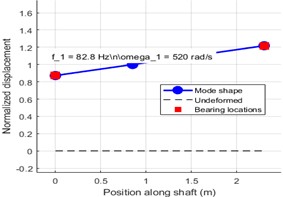
a) First vibration mode (predominantly translational), 82.8 Hz (520 rad/s)
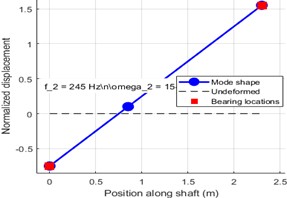
b) Second vibration mode (predominantly rotational), 245 Hz (1540 rad/s)
The calculated mode shapes of the asymmetric rotor-bearing system are presented in Fig. 3. The results demonstrate the existence of two coupled vibration modes caused by the asymmetric stiffness of the elastic supports.
The first mode corresponds to a predominantly translational motion of the rotor. In this mode the shaft moves almost uniformly along its length with a small rotational component. The natural frequency of this mode is 82.8 Hz (520 rad/s). The displacement distribution shows that the vibration amplitudes at the supports are different due to the stiffness asymmetry .
The second mode is mainly rotational and represents an angular oscillation of the rotor around a point located near the stiffer support. The corresponding natural frequency is 245 Hz (1540 rad/s). In this mode the displacements at the two supports have opposite directions, indicating significant rotational deformation of the rotor-support system.
The obtained mode shapes confirm that stiffness asymmetry and the offset position of the external force lead to coupling between translational and rotational motions of the rotor.
3.3. Dynamic amplification and operating safety
The dynamic coefficient 1.05 at operating speed (950 rpm) indicates quasi-static response regime. This 20-fold improvement over rigid-bearing systems (20-100 near resonance) results from:
1) Frequency separation: Operating speed at 21 % of critical (vs 95-105 % for rigid systems).
2) Impedance mismatch: Elastic supports reflect high-frequency energy back to rotor rather than transmitting to housing.
3) Phase shift: Damping in polyurethane creates lag between force and displacement, reducing work per cycle.
The vibration isolation efficiency can be quantified through transmissibility:
where is the frequency ratio.
With typical loss factor 0.1 for polyurethane and /0.21, calculated transmissibility 0.23, meaning 77 % of dynamic force is isolated from machine foundation.
Fig. 4 presents the frequency response functions of the asymmetric rotor-bearing system under unbalance excitation. The amplitude-frequency characteristics are shown for the rotor center displacement, angular displacement, and the vibration amplitudes at the left and right bearing supports.
The response curves exhibit pronounced resonance peaks near the natural frequencies of the system. The first resonance occurs near the first natural frequency 82.8 Hz, corresponding to the predominantly translational vibration mode. The second resonance corresponds to the higher rotational mode.
The red dashed line indicates the operating rotational speed of the rotor (950 rpm, approximately 15.8 Hz). This operating frequency is significantly lower than the first natural frequency of the system, resulting in a frequency ratio /0.21 which places the rotor in the stiffness-controlled regime.
The vibration amplitudes at the bearing supports differ due to the stiffness asymmetry of the elastic elements. The softer right support exhibits larger displacement amplitudes compared to the stiffer left support, confirming the influence of support stiffness on the dynamic response of the rotor system.
Fig. 4Frequency response of the asymmetric rotor–bearing system subjected to unbalance excitation
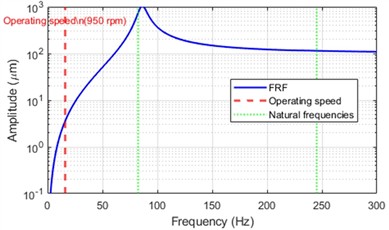
a) Translational displacement of the rotor center of mass as a function of excitation frequency
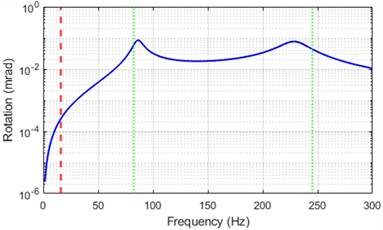
b) Angular displacement of the rotor cross-section
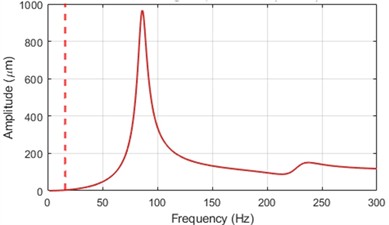
c) Vibration amplitude at the left bearing support (stiffer support)
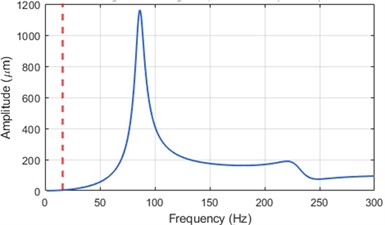
d) Vibration amplitude at the right bearing support (softer support)
3.4. Practical design considerations
As shown in Fig. 4, the frequency response curves clearly illustrate the resonance behavior near the natural frequencies.
Bearing load distribution: Under static conditions, the load distribution between the bearing supports follows the stiffness ratio of the elastic elements, i.e., 2. However, during dynamic operation the situation changes: vibration-induced inertial forces lead to a redistribution of loads, and the softer support experiences larger alternating stresses. Therefore, the material of the elastic element and bearing components should possess sufficient fatigue resistance.
Thermal effects: The dynamic modulus of polyurethane decreases by approximately 15-25 % at an operating temperature of about 50 °C. As a result, the stiffness of the elastic supports decreases, which leads to a reduction of the system's critical speeds by approximately 7-12 %. Nevertheless, the safety margin remains sufficient provided that the design is performed considering the worst-case operating conditions.
Although temperature variations reduce the stiffness of polyurethane by 15-25 %, the vibration isolation efficiency remains within an acceptable range due to the sufficient safety margin of the system.
Manufacturing tolerances: Manufacturing tolerances also influence the stiffness of the elastic supports. For example, a thickness variation of ±0.2 mm in a 2 mm polyurethane element results in a stiffness variation of approximately ±10 %. This variation is acceptable due to the significant safety margin of the system, since the ratio between the first critical speed and the operating speed is /4.7 (approximately a 400 % margin).
These results are consistent with fracture mechanics principles, where cyclic stresses may lead to crack initiation and propagation in rotating components [12].
4. Conclusions
This study presents a comprehensive dynamic analysis of a massive rotor supported by asymmetric elastic bearings, with specific application to gin machine shafts. The mathematical model based on Lagrange equations of the second kind yields the following principal findings:
Theoretical contributions and engineering implications:
1) Matrix formulation for asymmetric supports: The derived equations of motion in generalized coordinates capture coupled translational-rotational dynamics through stiffness matrix with non-zero off-diagonal terms. This extends classical rotor dynamics to configurations with intentional stiffness asymmetry.
2) Modal characteristics: The system exhibits two distinct vibration modes – predominantly translational at 520 rad/s ( 82.8 Hz) and rotational at 1540 rad/s ( 245 Hz).
3) Critical speed placement: Stiffness ratio /2 (achieved through 2 mm / 4 mm polyurethane elements) positions the first critical speed at 4474 rpm, providing safety factor of 4.7 relative to operating speed (950 rpm).
4) Vibration isolation effectiveness: Elastic supports reduce dynamic amplification factor from catastrophic values (100 for rigid bearings) to 1.05, achieving 94-fold reduction in vibration amplitude and 77 % isolation of dynamic forces from machine foundation.
5) Optimal asymmetry: Parametric analysis confirms that stiffness ratio /2 represents practical optimum – sufficient frequency separation without excessive vibration localization on softer support (amplitude ratio /0.73 remains acceptable for bearing life).
6) Operating regime: The working speed of 950 rpm lies in stiffness-controlled region (/0.21), ensuring insensitivity to speed fluctuations and load variations typical of cotton processing.
The proposed approach can be extended to other rotating machinery such as turbines and compressors with asymmetric support conditions.
Practical recommendations:
1) Design guidelines: For similar massive rotors (60-100 kg, 2-3 m), recommended polyurethane parameters are:
2) Dynamic modulus: 2.5-4 MPa.
3) Thickness ratio: 2 (creating /= 2).
4) Safety margin: 4.
Manufacturing tolerances: Thickness variations ±10 % in elastic elements are acceptable given substantial safety margin. Temperature effects (15-25 % stiffness reduction at 50 °C) should be accounted for in critical applications.
References
-
L. Niu, H. Cao, Z. He, and Y. Li, “A systematic study of ball passing frequencies based on dynamic modeling of rolling ball bearings with localized surface defects,” Journal of Sound and Vibration, Vol. 357, pp. 207–232, Nov. 2015, https://doi.org/10.1016/j.jsv.2015.08.002
-
Q. Han and F. Chu, “Nonlinear dynamic model for skidding behavior of angular contact ball bearings,” Journal of Sound and Vibration, Vol. 354, pp. 219–235, Oct. 2015, https://doi.org/10.1016/j.jsv.2015.06.008
-
G. Genta, Mechanical Engineering Series. New York, NY: Springer US, 2005, https://doi.org/10.1007/0-387-28687-x
-
E. Krämer, Dynamics of Rotors and Foundations. Berlin, Heidelberg: Springer Berlin Heidelberg, 1993, https://doi.org/10.1007/978-3-662-02798-1
-
S. Makhmudova, N. Tursunov, and G. Avazova, “Planar dynamic modeling of a rotor-bearing-housing system with polyurethane support layer,” Vibroengineering Procedia, Vol. 60, pp. 1–7, Dec. 2025, https://doi.org/10.21595/vp.2025.25509
-
N. Bekmurzaev, K. Nurmetov, and S. Alimukhamedov, “Creation of a wear-resistant bimetallic coating for the track treadmill of a crawler,” Vibroengineering Procedia, Vol. 60, pp. 370–377, Dec. 2025, https://doi.org/10.21595/vp.2025.25613
-
G. Nan, Y. Zhang, Y. Zhu, and W. Guo, “Nonlinear dynamics of rotor system supported by bearing with waviness,” Science Progress, Vol. 103, No. 3, pp. 1–18, Aug. 2020, https://doi.org/10.1177/0036850420944092
-
Y. Zhang, J. Wang, and G. Zhang, “Vibration characteristics of rolling element bearings with surface waviness,” Journal of Sound and Vibration, Vol. 429, pp. 215–232, 2018.
-
Z. Wan, Y. Wang, B. Chen, Y. Dou, and X. Wei, “The vibration of a transversely cracked rotor supported by anisotropic journal bearings with speed-dependent characteristic,” Applied Sciences, Vol. 10, No. 16, p. 5617, Aug. 2020, https://doi.org/10.3390/app10165617
-
Y. Guo and R. G. Parker, “Dynamic modeling and analysis of a spur planetary gear involving tooth wedging and bearing clearance nonlinearity,” European Journal of Mechanics – A/Solids, Vol. 29, No. 6, pp. 1022–1033, Nov. 2010, https://doi.org/10.1016/j.euromechsol.2010.05.001
-
Y. Wang, X. Xiong, and X. Hu, “Vibration and stability analysis of a bearing-rotor system with transverse breathing crack and initial bending,” Machines, Vol. 9, No. 4, p. 79, Apr. 2021, https://doi.org/10.3390/machines9040079
-
F. Adilov and S. Makhmudova, “Boundary element method for numerical solution to two-dimensional problems of fracture mechanic,” in The International Scientific and Practical Conference Rakhmatulin Readings, Vol. 3119, p. 040001, Jan. 2024, https://doi.org/10.1063/5.0217963
-
H.-M. Zhu, W.-F. Chen, R.-P. Zhu, L. Zhang, J. Gao, and M.-J. Liao, “Dynamic analysis of a flexible rotor supported by ball bearings with damping rings based on FEM and lumped mass theory,” Journal of Central South University, Vol. 27, No. 12, pp. 3684–3701, Nov. 2020, https://doi.org/10.1007/s11771-020-4510-z
-
M. I. Friswell, J. E. T. Penny, S. D. Garvey, and A. W. Lees, Dynamics of Rotating Machines. Cambridge University Press, 2010, https://doi.org/10.1017/cbo9780511780509
About this article

The authors have not disclosed any funding.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
The authors declare that they have no conflict of interest.
