Abstract
In this paper, a new approach is introduced to overcome the difficulty of applying the differential transformation method to the nonlinear oscillators described by . The obtained approximate periodic solutions are compared with those in open literatures and the results reveal that the present approach is very effective and convenient for a class of nonlinear oscillators with discontinuities.
1. Introduction
Since the beginning of 1986, Zhou [1] and Pukhov [2] have developed a so-called differential transformation method (DTM) for electrical circuits problems. The method has been used extensively to solve effectively various linear and nonlinear ordinary, partial and integro-differential equations [3-16]. However this method has a difficulty when applied to differential equations with discontinuous terms. So the main purpose of the present research is not only to solve this difficulty but also to show how to obtain the approximate periodic solutions for nonlinear oscillators with discontinuities. To our best knowledge, there is no paper reported in the literature on the application of the differential transformation method to differential equations with discontinuities.
It is well known that DTM constructs the solution in the form of a truncated series which is periodic only in a very small region [17]. In order to overcome this difficulty, a reliable aftertreatment (AT) technique has been developed recently in [18] to obtain the approximate periodic solutions in a wider range. As shown in [18], the proposed aftertreatment technique splits into two types, named as (Sine-AT technique, SAT) and (Cosine-AT technique, CAT) and for illustration we will re-introduce the basic idea of the CAT technique which will be used in this paper. It was shown in [18] that the approximate periodic solutions have been obtained without any need for Pade approximants or Laplace transform which may give the SAT and CAT techniques some power if compared with the modified differential transform method [17, 19]. Very recently Merdan and Gokdoan [19] showed that the Cosine-AT and Sine-AT give same results obtained by using the modified differential transform method and the classical fourth-order Runge-Kutta (RK4) method.
The rest of this paper is organized as follows: in the next section (Section 2) a brief description of the one-dimensional DTM is provided; in Sections 3 the basic idea of the Cosine-aftertreatment technique is discussed; in Section 4 the proposed techniques are implemented to obtain the approximate periodic solutions for three nonlinear oscillators with discontinuities; in Sections 5 and 6 some conclusions are given.
2. One-dimensional differential transform
The differential transform of a function is defined as follows:
In Eq. (1) is the original function and is the transformed function. The differential inverse transform of is defined as:
So:
Eq. (3) implies that the concept of differential transform is derived from the Taylor series expansion. In actual applications the function is expressed by a truncated series and Eq. (2) can be written as:
Some of the fundamental mathematical operations performed by the differential transform method are listed in Table 1.
Table 1The fundamental operations of one-dimensional DTM
Original function | Transformed function |
3. Cosine-aftertreatment technique (CAT-technique)
If the truncated series given by Eq. (4) is expressed only in even-powers of the independent variable , i. e.:
then the Cosine-aftertreatment technique (CAT-technique) is based on the assumption that this truncated series can be expressed as another finite series in terms of the cosine trigonometric functions with different amplitudes and frequencies:
where is finite.
Our main question here is how to find the values of and , For answer we begin by expanding both sides of Eq. (6) as power series of to obtain:
Now the equation of the coefficients of like powers yields:
In practical applications it is sufficient to express the truncated series in terms of two or three cosines with different amplitudes and frequencies. If we choose to express as an approximate periodic solution in terms of two cosines with two different amplitudes, and and two different frequencies, and, we can rewrite Eq. (6) for and as:
In this case the four unknowns and can be determined by solving the following system of nonlinear algebraic equations analytically:
Moreover, if we choose to express as more accurate periodic solution in terms of three cosines, we can rewrite Eq. (6) for and as:
In this case the six unknowns and can be determined by solving the following system of nonlinear algebraic equations numerically:
4. Applications
In this section we discuss the application of the DTM with the proposed Cosine-AT technique to obtain the periodic solutions of nonlinear oscillators with discontinuities. As explained in the previous section, the use of the Cosine-AT technique is based on obtaining the series solution of the problem under consideration as a finite polynomial in even powers of .
4.1. Example 1
Consider the nonlinear oscillator with a discontinuous term [20-23]:
with the initial conditions:
In Eq. (13) the major source of the difficulty in using the differential transformation method is the existence of the discontinuous term In order to overcome this difficulty we introduce a new approach to deal with such term. Firstly we suppose that:
which can be written as:
We then take a differentiation with respect to to obtain:
By this Eq. (13) becomes:
Now by applying the differential transform to Eqs. (14), (17) and (18) we obtain the following recurrence scheme for :
Using Eqs. (19) by taking , we obtain a system of algebraic equations for . By solving this system for the values of by using Mathematica, we get:
From the inverse transformation rule Eq. (4) we can construct the following truncated series solution up to :
Since the truncated series given by the last equation is expressed as a polynomial in even powers of , we can now deal with it by using the Cosine-AT technique. We assume an approximate periodic solution in the form:
In order to find and we insert and presented above into system Eq. (10) to get a system of four nonlinear algebraic equations. By solving this system analytically for and we obtain:
Therefore we can write the approximate periodic solution for the Eqs. (13-14) as:
Here it should be noted that this approximate periodic solution is valid regardless of the oscillation amplitude , i. e., for . In [20] the authors applied the parameter expansion method to Eqs. (13-14) and the following approximate periodic solution has been obtained:
Eq. (25) has been also obtained by the authors in [21] and [23] by using the max-min approach and He’s amplitude-frequency approach, respectively. The exact displacement of Eqs. (13-14) is given by [21]:
where denotes the Beta function.
In order to check the effectiveness of our approach we compare our result Eq. (24) with the approximate periodic solution obtained by the parameter-expansion and the max-min methods, given by Eq. (25) and the exact displacement Eq. (26) in Figs. 1-4 at different values of . From these figures it can be concluded that the suggested approach with the Cosine-AT technique leads to approximate periodic solutions with good accuracy for all amplitudes.
Fig. 1Comparison of the present approach, Eq. (24) with the parameter-expansion method [20], Eq. (25) and the exact solution (max-min [21]), Eq. (26) for example 1, at a=1
![Comparison of the present approach, Eq. (24) with the parameter-expansion method [20], Eq. (25) and the exact solution (max-min [21]), Eq. (26) for example 1, at a=1](https://static-01.extrica.com/articles/14635/14635-img1.jpg)
Fig. 2Comparison of the present approach, Eq. (24) with the parameter-expansion method [20], Eq. (25) and the exact solution (max-min [21]), Eq. (26) for example 1, at a=10
![Comparison of the present approach, Eq. (24) with the parameter-expansion method [20], Eq. (25) and the exact solution (max-min [21]), Eq. (26) for example 1, at a=10](https://static-01.extrica.com/articles/14635/14635-img2.jpg)
Fig. 3Comparison of the present approach, Eq. (24) with the parameter-expansion method [20], Eq. (25) and the exact solution (max-min [21]), Eq. (26) for example 1, at a=100
![Comparison of the present approach, Eq. (24) with the parameter-expansion method [20], Eq. (25) and the exact solution (max-min [21]), Eq. (26) for example 1, at a=100](https://static-01.extrica.com/articles/14635/14635-img3.jpg)
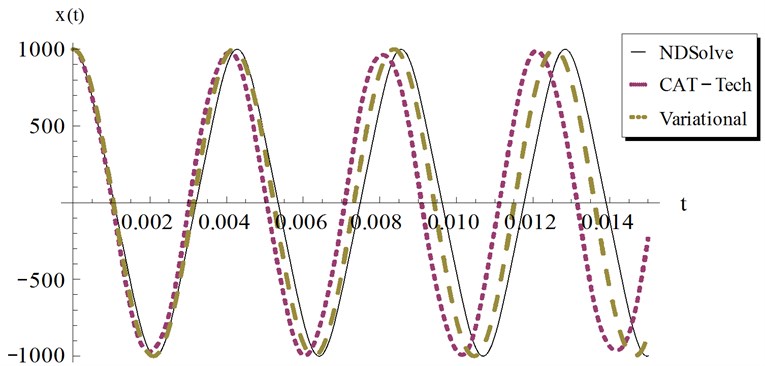
Fig. 4Comparison of the present approach, Eq. (24) with the parameter-expansion method [20], Eq. (25) and the exact solution (max-min [21]), Eq. (26) for example 1, at a=1000
![Comparison of the present approach, Eq. (24) with the parameter-expansion method [20], Eq. (25) and the exact solution (max-min [21]), Eq. (26) for example 1, at a=1000](https://static-01.extrica.com/articles/14635/14635-img4.jpg)
4.2. Example 2
Consider the nonlinear oscillator with a discontinuous term [24-25]:
with the initial conditions:
By the same analysis as in the previous example, we can easily obtain the following recurrence scheme for :
Using the above relations by taking , we obtain a system of algebraic equations for . By solving this system for the values of , we get:
Hence we have the following truncated series solution up to :
Here is also expressed as a polynomial in even powers of and as shown in the previous example we can deal with it by using the Cosine-AT technique. We also assume an approximate periodic solution in the form of Eq. (22). This leads to the approximate periodic solution:
which is also periodic for any given values of and . The approximate periodic solution obtained by the variational iteration method [24] is given by:
Fig. 5Comparison of the present approach, Eq. (32) with the variational iteration method, Eq. (33) and the numerical solution for example 2, at ϵ=0.1 and a=1
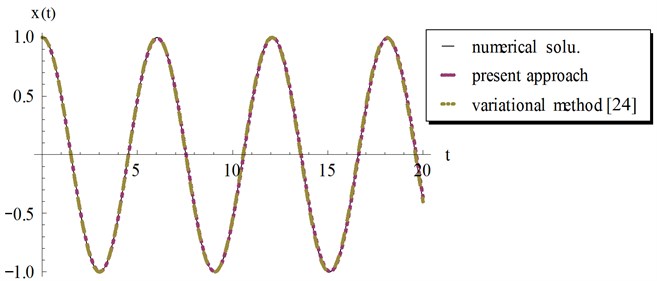
Fig. 6Comparison of the present approach, Eq. (32) with the variational iteration method, Eq. (33) and the numerical solution for example 2, at ϵ=0.2 and a=10
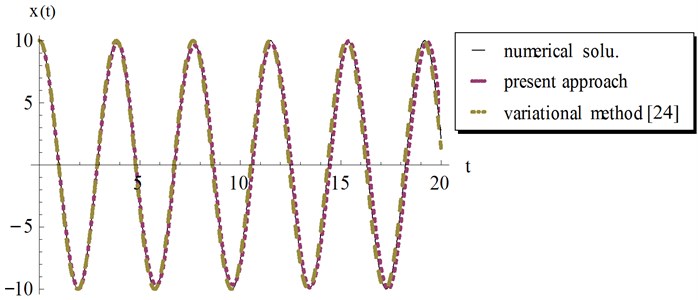
Fig. 7Comparison of the present approach, Eq. (32) with the variational iteration method, Eq. (33) and the numerical solution for example 2, at ϵ=0.3 and a=100
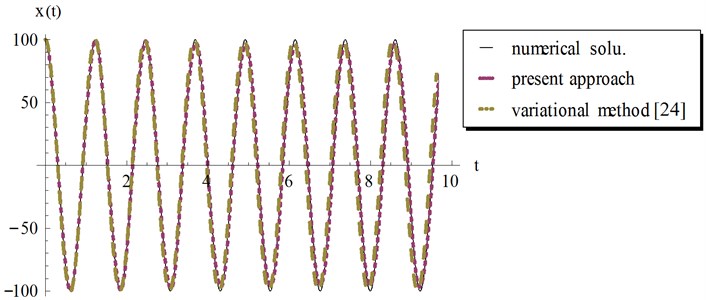
Fig. 8Comparison of the present approach, Eq. (32) with the variational iteration method, Eq. (33) and the numerical solution for example 2, at ϵ=0.01 and a=1000
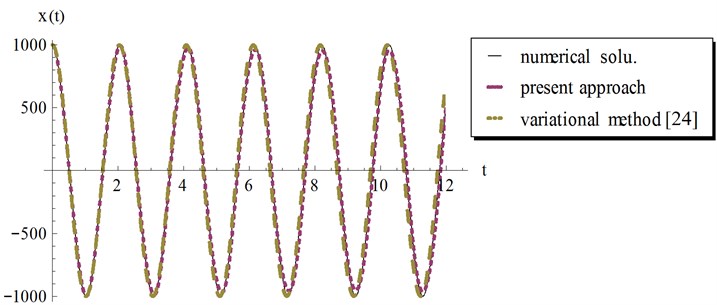
In Figs. 5-8 we compared our analytical approximate periodic solution in Eq. (32) with the variational iteration result Eq. (33) and the numerical solution obtained by Mathematica using the “NDSolve” command. It can be observed from these figures that our result in Eq. (32) provides excellent agreement with variational iteration method and the numerical solution regardless of the oscillation amplitude .
4.3. Example 3
This example considers the following equation [24, 25]:
with the initial conditions:
where the parameter is considered real. Proceeding as above, we obtain for :
Using , a system of algebraic equations is obtained for . On solving this system for yields:
Therefore the approximate series solution can be written as:
which is also expressed as a polynomial in even powers of . The Cosine-AT technique leads to the approximate periodic solution:
where and are given as:
In [24] the approximate periodic solution was obtained by using the variational iteration method and given by:
It should be noted that the solution Eq. (39) is always periodic under the two conditions:
and:
Examples for the values of and that satisfy these conditions are shown graphically by Fig. 9 at different values of the amplitude . The numerical results are depicted and compared with other solutions in Figs. 10-13 at different values of . The results show that at the Cosine-after treatment technique agrees with the other methods in a wider range of However this agreement decreases with increasing . It may be concluded that at large values of we have to increase the accuracy of our technique by increasing in Eq. (6).
Fig. 9Examples for the values of β and ϵ
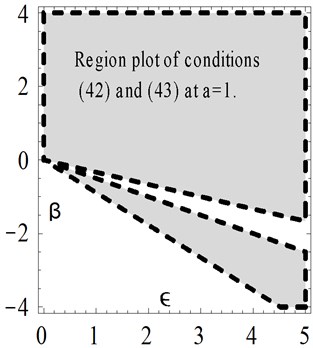
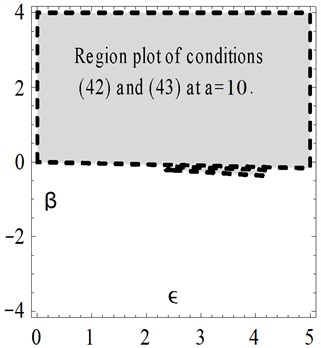
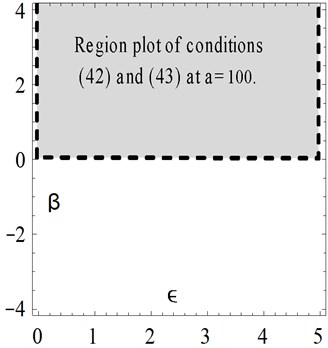
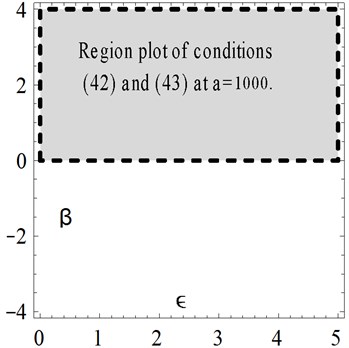
Fig. 10Comparison of the present Cosine aftertreatment technique, CAT-Tech., Eq. (39) with the variational iteration method, Eq. (41) for example 3, at a=1, β=-0.5 and ϵ=4
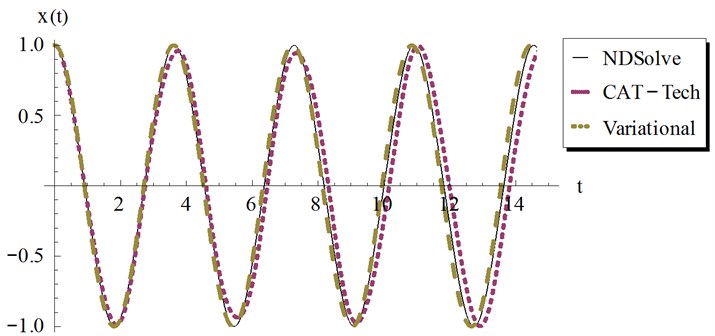
Fig. 11Comparison of the present Cosine aftertreatment technique, CAT-Tech., Eq. (39) with the variational iteration method, Eq. (41) for example 3, at a=10, β=1 and ϵ=3
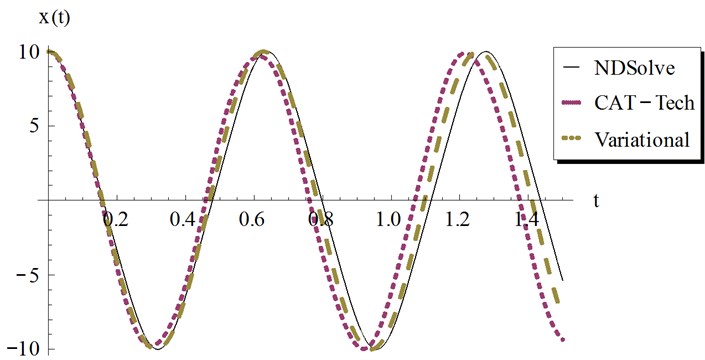
Fig. 12Comparison of the present Cosine aftertreatment technique, CAT-Tech., Eq. (39) with the variational iteration method, Eq. (41) for example 3, at a=100, β=3 and ϵ=4
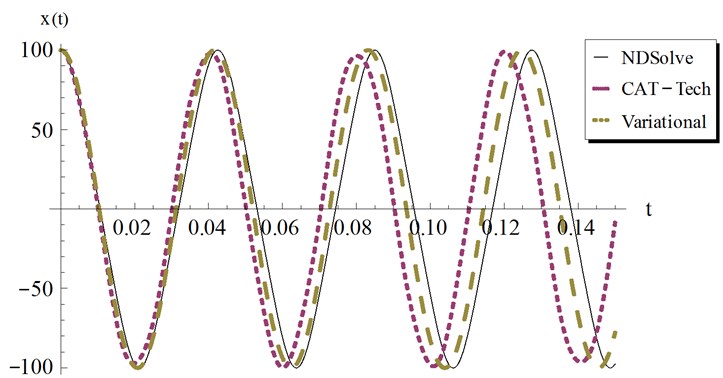
Fig. 13Comparison of the present Cosine aftertreatment technique, CAT-Tech., Eq. (39) with the variational iteration method, Eq. (41) for example 3, at a=1000, β=3 and ϵ=4
5. Remarks
In several papers [26-30] many authors showed that the DTM is nothing more than a disguised version of the Taylor series method. In this regard we agree with their point of view in the case when the DTM and Taylor series are applied to search for a series solution for a differential equation in which the discontinuous terms are not involved. However, it may be difficult to directly apply Taylor series method to obtain the series solutions for the present class of ordinary differential equations with discontinuous terms.
6. Conclusions
To our best knowledge, this is the first paper reported on the application of the differential transformation method to nonlinear oscillators with discontinuities. A new approach has been proposed to overcome the difficulty arising from the existence of the discontinuous terms. Three examples are solved and the obtained results demonstrate that the discontinuous function will not affect much the effectiveness and convenience of the differential transformation method.
References
-
J. K. Zhou Differential Transformation and Its Applications for Electrical Circuits. Huazhong University Press, Wuhan, China, 1986.
-
Pukhov G. E. Differential Transformations and Mathematical Modelling of Physical Processes. Kiev, 1986.
-
Shing Huei Ho, Cha’o Kuang Chen Analysis of general elastically end restrained non-uniform beams using differential transform. Applied Mathematical Modelling, Vol. 22, 1998, p. 219-234.
-
Ming-Jyi Jang, Chieh-Li Chen, Yung-Chin Liy On solving the initial-value problems using the differential transformation method. Appl. Math. Comput., Vol. 115, 2000, p. 145-160.
-
Cha’o Kuang Chen, Shing Huei Ho Transverse vibration of a rotating twisted Timoshenko beam under axial loading using differential transform. International Journal of Mechanical Sciences, Vol. 41, 1999, p. 1339-1356.
-
Muhammet Koksal, Saadetdin Herdem Analysis of nonlinear circuits by using differential Taylor transform. Computers and Electrical Engineering, Vol. 28, 2002, p. 513-525.
-
I. H. Abdel-Halim Hassan Different applications for the differential transformation in the differential equations. Appl. Math. Comput., Vol. 129, 2002, p. 183-201.
-
Aytac Arikoglu, Ibrahim Ozkol Solution of boundary value problems for integro-differential equations by using differential transform method. Appl. Math. Comput., Vol. 168, 2005, p. 1145-1158.
-
A. S. V. Ravi Kanth, K. Aruna Solution of singular two-point boundary value problems using differential transformation method. Phys. Lett. A, Vol. 372, 2008, p. 4671-4673.
-
Cha’o Kuang Chen, Shing Huei Ho Solving partial differential equations by two-dimensional differential transform method. Appl. Math. Comput., Vol. 41, p. 171-179.
-
Ming-Jyi Jang, Chieh-Li Chen, Yung-Chin Liy Two-dimensional differential transform for partial differential equations. Appl. Math. Comput., Vol. 121, 2001, p. 261-270.
-
Abd El-Halim Ebaid Approximate periodic solutions for the non-linear relativistic harmonic oscillator via differential transformation method. Commun. Nonlin. Sci. Numer. Simulat, Vol. 15, 2010, p. 1921-1927.
-
Fatma Ayaz Solutions of the system of differential equations by differential transform method. Appl. Math. Comput., Vol. 147, 2004, p. 547-567.
-
Shih-Hsiang Chang, I-Ling Chang A new algorithm for calculating one-dimensional differential transform of nonlinear functions. Appl. Math. Comput., Vol. 195, 2008, p. 799-808.
-
A. S. V. Ravi Kanth, K. Aruna Two-dimensional differential transform method for solving linear and non-linear Schrodinger equations. Chaos, Solitons and Fractals, Vol. 41, Issue 5, 2009, p. 2277-2281.
-
A. S. V. Ravi Kanth, K. Aruna Differential transform method for solving the linear and nonlinear Klein-Gordon equation. Computer Physics Communications, Vol. 180, 2009, p. 708-711.
-
Shaher Momani, Vedat Suat Erturk Solutions of non-linear oscillators by the modified differential transform method. Computers and Mathematics with Applications, Vol. 55, 2008, p. 833-842.
-
Abd Elhalim Ebaid A reliable aftertreament for improving the differential transformation method and its application to nonlinear oscillators with fractional nonlinearities. Commun. Nonlin. Sci. Numer. Simulat., Vol. 16, 2011, p. 528-536.
-
M. Merdan, A. Gökdoan Solution of nonlinear oscillators with fractional nonlinearities by using the modified differential transformation method. Mathematical and Computational Applications, Vol. 16, Issue 3, 2011, p. 761-772.
-
Shu-Qiang Wang, Ji-Huan He Nonlinear oscillator with discontinuity by parameter-expansion method. Chaos, Solitons and Fractals, Vol. 35, 2008, p. 688-691.
-
De-Qiang Zeng Nonlinear oscillator with discontinuity by the max-min approach. Chaos, Solitons and Fractals, Vol. 42, 2009, p. 2885-2889.
-
D. Q. Zeng, Y. Y. Lee, C. K. Wong Analysis of a nonlinear oscillator with discontinuity. Comput. Math. Appl., Vol. 59, Issue 8, 2010, p. 2510-2515.
-
Hui-Li Zhang Application of He’s amplitude-frequency formulation to a nonlinear oscillator with discontinuity. Comput. Math. Appl., Vol. 58, 2009, p. 2197-2198.
-
M. Rafei, D. D. Ganji, H. Daniali, H. Pashaei The variational iteration method for nonlinear oscillators with discontinuity. J. Sound. Vib., Vol. 305, 2007, p. 614-620.
-
Da-Hua Shou Variational approach for nonlinear oscillators with discontinuities. Comput. Math. Appl., Vol. 58, 2009, p. 2416-2419.
-
C. Bervillier Status of the differential transformation method. Appl. Math. Comput., Vol. 218, 2012, p. 10158-10170.
-
S. Abbasbandy, C. Bervillier Analytic continuation of Taylor series and the boundary value problems of some nonlinear ordinary differential equations. Appl. Math. Comput., Vol. 218, 2011, p. 2178-2199.
-
G. Corliss, Y. F. Chang Solving ordinary differential equations using Taylor series. ACM Trans. Math. Software, Vol. 8, 1982, p. 114.
-
R. Barrio, M. Rodriguez, A. Abad, F. Blesa Breaking the limits: the Taylor series method. Appl. Math. Comput., Vol. 217, 2011, p. 7940-7954.
-
D. H. Bailey, R. Barrio, J. M. Borwein High-precision computation: mathematical physics and dynamics. Appl. Math. Comput., Vol. 218, 2012, p. 10106-10121.
About this article

