Abstract
This study investigates adaptive sliding neural network (NN) control for quarter active suspension system with dynamic uncertainties and road disturbances. A Multilayer Perceptron (MLP) neural network is adopted to estimate the unknown dynamics of the system. In addition, sliding mode controller is introduced to compensate the function of estimation error for improving the performance of the system. Furthermore, the uniformly and bounded of closed-loop signals is guaranteed by Lyapunov analysis; the adaptation laws for training of MLP are derived from stability analysis. The simulation results demonstrate that the proposed controller can effectively provide a good ride and makes great trade-off between passenger comfort and handling despite the dynamic uncertainties.
1. Introduction
By the advances in the electronic industry and control, vehicle designers tend to engage active suspension system to enhance safety and stability in their products. Among all types of suspension systems, Active suspension which is used for increasing passenger comfort and handling has satisfied the car producers in recent years [1-3]. There are three different types of suspension systems, namely, passive suspension systems, semi-active suspension systems, and active suspension systems. So far, many models for different kind of suspension systems and controllers have been proposed, Hung [4] considered the parametric uncertainties. In [5], Adaptive Neural network observer was used for nonlinear Active suspension system with parametric uncertainty and support the high performance with considering actuator saturation. In [6], Zapaterio proposed a Neural network controller based on back stepping approach for class of vehicle suspension with Magnetohelogical (MR) actuator. Sun [7] by considering the parametric uncertainties used an adaptive back stepping controller to stabilize the motion of the car body. Ghahremani and Khaloozadeh [8] proposed optimal robust adaptive controller with parametric uncertainty. In [9] an adaptive tracking control was proposed to defeat parametric uncertainties, external disturbances and unknown non-ideal actuators. This [10], deals with adaptive sliding mode control in order to make trade-off between ride comfort and handling for semi-active magneto-rheological damper. This [11], proposes an adaptive sliding mode control for nonlinear active suspension systems via (T-S) fuzzy approach. In this paper we consider adaptive sliding neural network (NN) control for quarter active suspension system with dynamic uncertainties and road disturbances. Results shows it is a great choice for utilizing compensator to deal with the functional approximation error based on sliding mode controller. Our proof for utilizing new Adaptive neural networked based vibration control of a nonlinear quarter car model is inspired by [12].
2. Problem formulation
The proposed nonlinear quarter car suspension system with two degree of freedom dynamic model is shown in Fig. 1, despite the fact that quarter car suspension model is simple, but it is comprehensive to simulate and adopt different characteristics of real suspension system.
Fig. 1A nonlinear quarter car suspension model
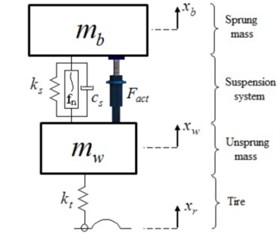
The suspension system is like a bridge between the sprung and unsprung masses, and are vertical displacements of sprung and unsprung masses; and is the road profile. The state space equation of motion for this suspension system can be expressed as:
In this research, we consider the dynamic of the system unknown and our proposed controller cannot be affected by uncertainties. The linear stiffness of suspension spring is defined as and stiffness of tire denoted as , damping constant of suspension is named . The nonlinear characteristic of suspension is which can model the cubic stiffness and is the nonlinear spring coefficient, the new controller is not sensitive by changing constants and masses and so on; and our new controller can estimate the unknown dynamics of the system:
The states of the quarter suspension are defined as:
The nonlinear quarter car model dynamics is defined as follows:
where:
Term is used for estimation of actuator force which is represented as follows:
3. Neural network controller
In the control engineering, a Neural Network (NN) is usually utilized to approximate structure or parametric uncertainties [13], The structure of Multilayer Perception (MLP) has been proposed in the design of this combinational controller, consists of three layers input, hidden and output. Three-layer neural network is employed to approximate the uncertain dynamic in the model of system. The output of this NN can be obtained:
Let Taylor series expansion of the function be:
where is weight vector of hidden and output layer, is the derivative of output with respect to parameters.
4. Design of sliding mode controller
To evaluate the performance of suspension system with help of NN for estimating the unknown dynamics has been studied. As the first step, a stable sliding surface is defined as:
In which is a positive constant, multiplying both sides of Eq. (16) in matrix :
By differentiating Eq. (17) and replacing that in Eq. (5) results in:
Eq. (9) can be rewritten as follows:
In Eq. (18) has been assumed been assumed is uncertain and unknown, which can be estimated by NN; on the other hand, and , are Neural Networks of MLP.
According to Eq. (10) and considering estimation of by NN, control signal can be represented as follows:
In which and are positive parametric vectors. By replacing Eq. (21) in Eq. (19) which yields:
Adding and subtracting from Eq. (22) can be expressed as:
where in which and are optimal parameters of NN; Moreover, if NN parameters and converge to optimal values, the error estimation signal will reach minimum value or zero. According to Eq. (2) the outputs and can be rewritten as follows:
In which is the error estimation:
In the Eq. (26), is the NN parameters error estimation vector which can be defined as following:
5. Stability analysis
In this section, we will analyze the closed-loop stability in details. Considering the Lyapunov function as follows:
where is adaptive rate and is the sliding surface which has been defined in Eq. (16).
From Eq. (30), if the gain is chosen as it is obviously obtained that and the asymptotically stability performance is derived:
From the above proven equations, it is obvious that derivative Lyapunov function is a non-positive function. From the fact that the outputs of the system are bounded, it is derived that the second-order derivative of is also bounded and then based on Barbalat’s lemma the asymptotically stability is proved.
6. Simulation
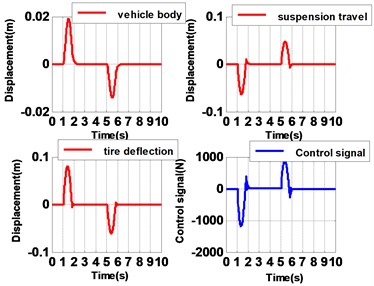
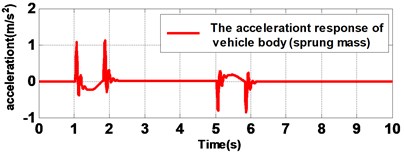
In this section, some results are shown to support the performance of the proposed new controller. It is clear that the vibration of the vehicle system comes from uneven road surfaces; in this research sinusoidal profile road is considered, Fig. 2. Variation of displacements related to suspension system should not exceed the desirable range (±8 cm) for it. It is generally approved that three main suspension performances should be taken into account when proposing new suspension controller: 1) mitigating the sprung mass acceleration which can guarantee the passenger comfort. 2) decreasing the tire deflection which is associated with the contact of force of tire and different road profiles. 3) suspension travel , it is clear that the aim of the new controller is reached, on the other word, making trade-off between ride control and handling by directly controlling the suspension-force with unknown dynamic. Fig. 3 show the simulation results. This controller is more successful in decreasing vertical acceleration, increasing ride comfort, decreasing tire displacements and increasing handling. Also, it is capable to stay stable in extreme roads’ disturbance and dynamic uncertainty.
Fig. 2Different road profiles
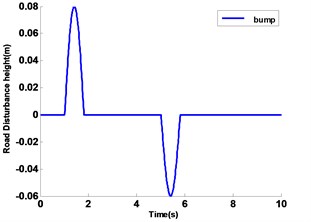
Fig. 3Rejection performance of sinusoidal disturbance
a)
b)
7. Conclusions
In this study adaptive sliding neural network controller has been designed to overcome dynamic uncertainties in the model of quarter suspension system and road disturbances. The proposed controller can estimate the unknown dynamics with respect to Lyapunov stability analysis which all closed loop signals are bounded and uniformly. Furthermore, new controller makes good compensation between handling and passenger comfort.
References
-
Hrovat D. Survey of advanced suspension developments and related optimal control applications. Automatica, Vol. 33, Issue 10, 1997, p. 1781-1817.
-
Li P., Lam J., Cheung K. C. Multi-objective control for active vehicle suspension with wheel base preview. Journal of Sound and Vibration, Vol. 333, 2014, p. 5269-5282.
-
Li Zhongjie, Zuo Lei, et al. Electromagnetic energy-harvesting shock absorbers: design, modeling, and road tests. IEEE Transactions on Vehicular Technology, Vol. 62, Issue 3, 2013, p. 1065-1074.
-
Hoque M. E., Takasaki M., Ishino Y., et al. Development of a three-axis active vibration isolator using zero-power control. IEEE/ASME Transactions on Mechatronics, Vol. 11, Issue 4, 2006, p. 462-470.
-
Feng Zhao, et al. Adaptive neural network control for active suspension system with actuator saturation. IET Control Theory and Applications, Vol. 10, Issue 14, 2016, p. 1696-1705.
-
Zapateiro M., Luo N., Karimi H. R., et al. Vibration control of a class of semiactive suspension system using neural network and backstepping techniques. Mechanical Systems and Signal Processing, Vol. 23, Issue 6, 2009, p. 1946-1953.
-
Sun W., Gao H., Kaynak O. Adaptive backstepping control for active suspension systems with hard constraints. IEEE/ASME Transactions on Mechatronics, Vol. 18, 2013, p. 1072-1079.
-
Azadeh Ghahremani, Khaloozadeh Hamid Optimal control of active suspension system with parametric uncertainty. 2th International Conference on Researches in Science and Engineering, Istanbul-Turkey, 2016.
-
Pan Huihui, Sun Weichao Adaptive tracking control for active suspension systems with non-ideal actuators. Journal of Sound and Vibration, Vol. 399, 2017, p. 2-20.
-
Saikat Dutta A new adaptive sliding mode control for Macpherson strut suspension system with magneto-rheological damper. Journal of Intelligent Material, Vol. 27, Issue 20, 2016, p. 2795-2809.
-
Li Hongyi Adaptive sliding-mode control for nonlinear active suspension vehicle systems using T-S fuzzy approach. IEEE Transactions on Industrial Electronics, Vol. 60, Issue 8, 2013, p. 3328-3338.
-
Cetin Saban Adaptive vibration control of a nonlinear quarter car model with an electromagnetic active suspension. Journal of Vibroengineering, Vol. 17, 2015, p. 3063-3078.
-
Du H., Zhang N. Fuzzy control for nonlinear uncertain electrohydraulic active suspensions with input constraints. IEEE Transactions on Fuzzy Systems, Vol. 17, Issue 2, 2009, p. 343-356.
About this article

