Abstract
This research presents the single Fourier sine transform method (SFSTM) for solving the Saint Venant torsion problem of rectangular prismatic bars. The problem is a common theme in the theory of elasticity of unrestrained torsion which was previously expressed by Prandtl using Prandtl stress functions as a Poisson type nonhomogeneous partial differential equation (PDE) called the stress compatibility equation. In this work the SFSTM was applied to the stress compatibility equation, converting the PDE to an easier to solve ordinary differential equation (ODE) in the transformed domain. The boundary conditions were used to find the integration constant and inversion was used to find the solution in the physical domain. The non vanishing stresses and torsional moments were thus found as a single series of infinite terms with rapid convergence. The maximum stresses and moments were found in standard form in terms of torsional parameters which were tabulated for various ratios of the cross-sectional dimensions. A comparison of the torsional parameters with previous results show that the present results are identical with previous results illustrating the accuracy of the SFSTM used. The sine kernel of the SFSTM satisfies the boundary conditions of the problem and contributed to the exact solution obtained. The SFSTM simplified the PDE to an ODE which is simpler to solve.
Highlights
- This research presents the single Fourier sine transform method (SFSTM) for solving the Saint Venant torsion problem of rectangular prismatic bars.
- In this work the SFSTM was applied to the stress compatibility equation, converting the PDE to an easier to solve ordinary differential equation (ODE) in the transformed domain.
- The boundary conditions were used to find the integration constant and inversion was used to find the solution in the physical domain.
- The non vanishing stresses and torsional moments were thus found as a single series of infinite terms with rapid convergence.
- The maximum stresses and moments were found in standard form in terms of torsional parameters which were tabulated for various ratios of the cross-sectional dimensions.
- A comparison of the torsional parameters with previous results show that the present results are identical with previous results illustrating the accuracy of the SFSTM used.
1. Introduction
Torsion in beams result from the action of shear loads whose points of application do not coincide with the shear center of the beam cross section. Torsion would occur when a reinforced concrete encased I-section steel beam is subjected to a brick/block wall such that the weight of the wall acts at an eccentricity from the shear center of the cross-section. Torsion also arises when a reinforced concrete floor beam is cast in-situ with its supporting edge beams with the edge beams prone to torsional stresses upon the application of floor loads.
The analysis of torsional stresses and strains is thus an important aspect of structural analysis and design and is embodied as a requirement in codes of structural design.
Problems of torsional analysis are developed using the theory of elasticity. The basic assumptions used are kinematic equations, constitutive laws, equilibrium equations and compatibility relations [1-3].
Saint Venant formulated the problem of unrestrained torsion using theory of elasticity and Prandtl solved the Saint Venant torsion problem using Prandtl’s stress function. Prandtl’s stress function formulation of Saint Venant unrestrained torsion problem resulted in a Poisson partial differential equation (PDE); solvable using numerical or closed form mathematical methods [4, 5].
The numerical methods that have been used to solve the Saint Venant torsion problem are: Finite Difference Method (FDM), Finite Element Method (FEM), Finite Volume Method, Boundary Element Methods and Variational Methods of Ritz, Galerkin and their modifications.
The mathematical methods that have been used for closed form solutions include: the method of separation of variables, eigen function expansions, integral transformations, and Green functions.
Joy and Mokashi [6], and Abdelkadr et al. [7] used the finite element method to present Saint Venant torsional and bending solutions for prismatic bars with non-circular cross-sections. Their solutions were validated by favourable comparisons with previous results in the literature.
Chen [8] used the finite volume method to study Saint Venant’s torsion problems.
Ike [9] used the Galerkin method to obtain closed form analytical solutions for the Saint Venant torsion of prismatic bars with rectangular cross-sections. The study used Prandtl’s stress function formulation of the Saint Venant torsion problem. The study adopted trigonometric (cosine) shape functions which were exact shape functions that satisfied the boundary condition of the problem to derive the Galerkin integral equations which were minimized with respect to the undetermined parameters to give the exact solution for the Prandtl stress function and hence exact solutions for the stresses, torsional moments and the torsional constants.
Francu et al. [10] used analytical method to solve the problem of Saint-Venant torsion of non-circular bars with prismatic cross-sections, and obtained accurate solutions for the stresses, moments and torsional constants.
Ike and Oguaghamba [11] used the Double finite sine transform method (DFSTM) to obtain closed form mathematical solutions for the Saint-Venant torsional analysis of beams with rectangular cross-section. Agarana and Agboola [12] presented an analysis of Saint-Venant torsional problems of circular beams made with different engineering materials.
Romano et al. [13], Brice and Pickings [14] and Hughes et al. [15] have also studied the Saint-Venant’s torsional problems of beams using analytical and experimental approaches.
Fogang [16] studied the Saint-Venant unrestrained torsional problem of beams using the Green’s theorem and the finite difference method (FDM). The FDM adopted in the study is a numerical method for solving boundary value problems (BVPs) by expressing the governing differential equation (GDE) in finite difference form and discretizing the solutions domain by introducing grid points. The finite difference method then seeks a solution of the GDE at each of the grid points such that boundary conditions are satisfied. Fogang [16] used a two-dimensional grid network for the beam cross-section and additional grid/node points were introduced at the beam boundaries. These additional nodes at the boundaries permitted the solution of the GDE at the boundaries and the satisfaction of boundary conditions. The study considered beams with solid cross-sections and beams with multiply connected cross-sections. The study obtained results that were comparable with the closed form solutions for rectangular beams, and the accuracy of the FDM results increased with the refinements of the finite difference grids, though at the cost of increased computational rigour.
Noor and Robertson [17] presented a variational development of the governing differential equations (GDEs) via a mixed formulation approach for the Saint-Venant torsional analysis of heterogeneous, isotropic bars. The GDEs obtained were three first-order partial differential equations (PDEs) in terms of the shear stresses and warping function. The study discussed the basic merits of mixed formulation over the stress and displacement based approaches. A finite difference method was applied to the GDEs to obtain approximate solution which was validated by comparison with previous solutions in the literature.
Guendouz et al. [18] presented an analysis of torsion-bending problems of a composite beam with open cross-section using the advanced and refined theory of one-dimensional (1D) and three-dimensional (3D) beams and the 3D Saint-Venant’s refined beam theory.
2. Theoretical framework
2.1. Basic assumptions
The basic assumptions are:
– The beam has an axis of twist about which the cross-section rotates approximately as a rigid body.
– The cross-section is constant along the length of the bar.
– The deformation of the bar consists of: (a) rotations of the cross-section about an axis that passes through the center of the twist of the bar, and (b) warping of the cross-section which is constant for all the cross-sections.
2.2. Displacement field
The displacement field components are:
where , , and are displacements in the , , and coordinate directions respectively; is the warping function; and is the angle of rotation of the cross-section at a distance from the origin.
2.3. Strains
The normal strains and shear strains are found using the small-displacement theory of elasticity as:
2.4. Stresses
The normal stresses , , and shear stresses , , are:
where is the shear modulus.
2.5. Differential equations of equilibrium
The differential equations of equilibrium are:
where , , and are body force components in the , , and axes respectively.
The equations of equilibrium for the Saint-Venant torsion problem when body forces are ignored are:
Integration of Eqs. (5a) and (5b) give:
2.6. Prandtl stress function
Prandtl derived a scalar stress function in terms of stresses that satisfy the equilibrium equations as:
The stress compatibility equation is:
The strain compatibility equation is:
The strain compatibility equation is expressed in terms of Prandtl stress function as:
where is the Laplacian.
2.7. Torsional moment,
The torsional moment, is:
where is the cross-sectional domain of the beam.
3. Methodology
The Saint Venant torsional problem is solved here for rectangular beam shown in Fig. 1.
Fig. 1Cross-section of the rectangular beam subjected to unrestrained torsion
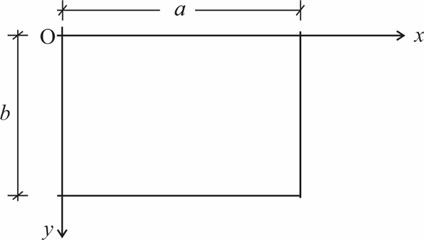
The Saint Venant torsion equation in terms of Prandtl stress function is the stress compatibility equation:
where , .
The boundary conditions are:
Applying the single Fourier sine transformation (SFST) to the stress compatibility equation yields the integral equation:
The single Fourier sine transform method (SFSTM) is a linear transformation. Using the linearity properties of the transformation, Eq. (15) is:
Integrating by parts:
From the boundary conditions, Eq. (14), .
Hence:
where:
is the SFST of
Similarly:
Also:
where is odd; 1, 3, 5, 7,….
Hence, the SFST of the stress compatibility equation is the ordinary differential equation ODE:
4. Results
4.1. General solution
The homogeneous solution to Eq. (22) using the method of trial functions is:
The particular solution is:
The general solution is:
The unknown integrating constants and are found using the boundary conditions at 0 and .
The application of FSTM on the boundary conditions give:
From Eq. (26a).
Thus:
Solving:
From Eq. (26b):
Simplifying Eq. (29) gives:
Further simplification gives:
Solving for gives:
Hence:
Simplifying gives:
4.2. Solution in the physical space
By inversion of we have:
Hence, using Eq. (34) gives:
4.3. Shear stresses
The shear stresses are found using Eqs. (7a) and (7b) as:
4.4. Torsional moment,
The torsional moment is given by Eq. (12).
Substituting the expression for in Eq. (12) gives:
Evaluating the integrals and simplifying gives:
Let:
Then:
is expressed in general as:
where:
can be expressed as:
Then:
Let , , then for:
where and are calculated for various values of / and shown in Table 1.
Torsional moments are also presented for various values of and in Table 2 along with previous results.
Table 1Torsional parameters for rectangular cross-sections
/ | Present study | Francu et al. [10]; Ike [9] | Present study | Francu et al. [10]; Ike [9] |
1.0 | 0.141 | 0.141 | 0.208 | 0.208 |
1.5 | 0.196 | 0.196 | 0.231 | 0.231 |
2 | 0.229 | 0.229 | 0.246 | 0.246 |
2.5 | 0.249 | 0.249 | 0.256 | 0.256 |
3 | 0.263 | 0.263 | 0.267 | 0.267 |
4 | 0.281 | 0.281 | 0.282 | 0.282 |
6 | 0.299 | 0.299 | 0.299 | 0.299 |
10 | 0.312 | 0.312 | 0.312 | 0.312 |
0.333 | 0.333 | 0.333 | 0.333 |
Table 2Torsional moments for cross-sections 2a×2b
Cross-section | Present study | Timoshenko and Goodier [2] Exact | |
1 | 1 | 2.2492 | 2.2492 |
2 | 1 | 7.3178 | 7.3178 |
3 | 1 | 12.6392 | 12.6392 |
4 | 1 | 17.9720 | 17.9720 |
5 | 1 | 23.3053 | 23.3053 |
6 | 1 | 28.6337 | 28.6337 |
7 | 1 | 33.9720 | 33.9720 |
8 | 1 | 39.3053 | 39.3053 |
5. Discussion
In this paper, exact analytical solutions have been obtained for the Saint Venant torsional problem of rectangular beams using the single Fourier sine transform method (SFSTM). The Saint Venant torsion problem is a Poisson type partial differential equation (PDE) expressed using Prandtl’s stress function The SFSTM converted the nonhomogeneous PDE to an ordinary differential equation ODE in the transformed domain which is easier to solve using methods for solving ODEs. Use of boundary conditions and inversion of the general solution gave the Prandtl stress function in the physical domain variables, from which the stresses and torsional moments were found. The stresses and torsional moments were expressed in terms of parameters and and presented in Tables 1 and 2 along with previously determined values by other researchers. Tables 1 and 2 illustrate that the present SFSTM solutions are identical with previous solutions by Ike [9] who used the Galerkin variational method and cosine basis functions; Francu et al. [10] and Timoshenko and Goodier [2].
6. Conclusions
This paper has presented a SFSTM for solving the Saint Venant torsion problem formulated as a Poisson type PDE in terms of the Prandtl stress function.
1) The SFSTM yielded analytical solutions to the Saint Venant torsion problem of prismatic bars with rectangular cross-section.
2) The SFSTM transformed the PDE to a more easily solved ODE in the transformed domain.
3) The kernel of the SFSTM satisfied the boundary conditions of the Saint Venant torsion problem and is the reason for the exact solution obtained.
4) The shear stresses, and torsional moments are convergent single series that give accurate solution with a few terms of the series.
5) The solutions obtained for the stresses, and torsional moments are identical to previous solutions obtained using Galerkin variational methods and the method of separation of variables.
References
-
M. H. Sadd, Elasticity: Theory, Applications and Numerics, 3rd Edition. USA: Academic Press, 2014.
-
S. P. Timoshenko and J. N. Goodier, Theory of Elasticity. New York: McGraw Hill, 1969.
-
S. Erdoğan, “Determination of stresses in Vlasov beam sections,” Master of Science Thesis, Middle East Technical University, 2019.
-
I. Ecsedi and A. Baksa, “Prandtl’s formulation for the Saint-Venant’s torsion of homogeneous piezoelectric beams,” International Journal of Solids and Structures, Vol. 47, No. 22-23, pp. 3076–3083, Nov. 2010, https://doi.org/10.1016/j.ijsolstr.2010.07.007
-
I. Ecsedi, “Some analytical solutions for Saint-Venant torsion of non-homogeneous cylindrical bars,” European Journal of Mechanics – A/Solids, Vol. 28, No. 5, pp. 985–990, Sep. 2009, https://doi.org/10.1016/j.euromechsol.2009.03.010
-
C. S. Joy and I. S. Mokashi, “A finite element method for the Saint-Venant torsion and bending problems for prismatic bars,” Computers and Structures, Vol. 135, pp. 62–72, 2014, https://doi.org/10.1016/j.compstruct2014.01.010
-
K. Abdelkader, Z. Toufik, and B.-J. Mohamed, “Torsional stress in non-circular cross sections by the finite element method,” Advances in Mechanical Engineering, Vol. 7, No. 5, pp. 1–20, May 2015, https://doi.org/10.1177/1687814015581979
-
H. Chen, “Saint Venant’s torsion by the finite volume method,” Master of Science Thesis, University of Virginia, 2019.
-
C. Ike, “Galerkin solutions for the Saint-Venant torsion of prismatic bars with rectangular cross-sections,” Advances in Modelling and Analysis A, Vol. 56, No. 1, pp. 13–20, Mar. 2019, https://doi.org/10.18280/ama_a.560103
-
J. Francu, P. Navackova, and P. Janicek, “Torsion of a non-circular bar,” Engineering Mechanics, Vol. 19, No. 1, pp. 45–60, 2012.
-
C. C. Ike and O. A. Oguaghamba, “Double finite sine transform method for Saint-Venant torsional analysis of beams with rectangular cross-section,” in Proceedings of Sustainable Engineering and Industrial Technology Conference, 2023.
-
Olasunmbo Agboola, “Analysis of torsional rigidity of circular beams with different engineering materials subjected to St Venant torsion,” International Journal of Impact Engineering, Vol. 3, No. 2, pp. 33–46, 2015.
-
G. Romano, A. Barretta, and R. Barretta, “On torsion and shear of Saint-Venant beams,” European Journal of Mechanics – A/Solids, Vol. 35, pp. 47–60, Sep. 2012, https://doi.org/10.1016/j.euromechsol.2012.01.007
-
R. Brice and R. Pickings, “Saint-Venant torsion constant of modern precast concrete bridge girders,” PCI Journal, pp. 23–31, 2021.
-
A. F. Hughes, D. C. Iles, and A. S. Malik, “Design of steel beams in torsion: in accordance with Eurocodes and the UK National Annexes Steel Construction Institute,” 2021.
-
V. Fogang, “Cross-sectional analysis of beams subjected to Saint-Venant torsion using the Green’s theorem and the finite difference method,” Preprints, Vol. 2022, p. 2022030410, Jun. 2022, https://doi.org/10.20944/preprints202203.0410.v3
-
A. K. Noor and K. J. Robertson, “On a mixed formulation of Saint-Venant torsion problem of nonhomogeneous anisotropic bars,” University of New South Wales, 1971.
-
I. Guendouz, M. Khebizi, H. Guenfoud, M. Guenfoud, and R. El Fatmi, “Analysis of torsional bending FGM beam by 3D Saint-Venant refined beam theory,” Structural Engineering and Mechanics, Vol. 84, No. 3, pp. 423–435, 2022, https://doi.org/10.12989/2022.84.3.423
About this article

The authors have not disclosed any funding.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
The authors declare that they have no conflict of interest.
