Abstract
Wireless sensor networks are widely used in communication, medical treatment, radar and detection. With the vigorous development of computer science and intelligent technology, wireless sensor networks are also constantly improving in the development. Sensor networks are prone to noise interference when input signals, which will affect the estimation accuracy of the network. In order to enhance the signal of sensor network and improve its accuracy, a distributed filtering algorithm based on fusion adaptive weighting is proposed. Before building the model, the experiment first studied the three traditional adaptive filtering algorithms, LMS, RLS and AP, as the basis for building the experimental model. Then, combined with the distributed characteristics of the sensor network, the attributes of the nodes and their influence in the network were considered in the experiment, and the importance and support of the nodes were linearly weighted to obtain the estimated certainty of each sensor node to the target. Finally, a fusion adaptive weighted distributed filtering algorithm is constructed in the experiment. The simulation experiment verifies that the constructed model can reduce the noise interference to a certain extent, which is conducive to the enhancement of its network signal, and its error estimation accuracy is also improved.
1. Introduction
Wireless sensor network has very important applications in communication and computer technology. The main function of the sensor network is to use multiple sensors to detect and collect information on an object in the region, and to feed back the obtained information to the device or user controlling the whole network after processing [1]. When the sensor observes a variety of physical quantities, it also uses a variety of parameter estimation algorithms to estimate the required physical quantities of the observed objects. The traditional wired sensor connects the sensor directly to the receiving device, which requires a lot of operating space and is complicated to maintain. Compared with traditional sensors, wireless sensors do not require frequent equipment changes or a lot of operating space. Therefore, wireless sensors have higher flexibility, security, reliability and cost advantages. However, the signal of sensor network is susceptible to interference from environmental noise when receiving, thus affecting the accuracy of network estimation [2]. With the innovation and development of intelligent technology in recent years, sensor networks are constantly updated, and the means of eliminating noise interference are gradually optimized. Filter is a kind of noise elimination method which is widely used in signal processing. The filter effectively filters out specific frequency points in the signal, after which signals of specific frequency can be obtained [3]. There are many researches on the specific functions of filters in the aspects of network noise elimination and signal enhancement. Moreover, with the requirements of practical engineering applications, a variety of filtering algorithms have been developed, which have exclusive advantages in their respective application fields [4]. Adaptive filter is one of them, mainly by observing the signal value and constantly updating and adjusting the filter weight coefficient, in order to estimate the statistical characteristics of the whole system to achieve the best filtering effect. In order to enhance the signal of the sensor network, this experiment combined with the filter can effectively eliminate the noise interference function, and in view of the sensor network signal vulnerable to interference, a fusion adaptive weighted distributed filtering algorithm is proposed. The algorithm takes into account the attributes of the nodes themselves and their influence in the network. The importance and support of the nodes are weighted linearly to obtain the estimated certainty of each sensor node to the target. Therefore, the signal enhancement of wireless sensor network with adaptive filter is studied in the experiment.
Adaptive filter is an important research content of information processing technology. Many researchers in the research field pay attention to it and have achieved certain results in all application levels. Yu et al. proposed a M-NSAF algorithm model, and derived a variable step size M-NSAF algorithm on this basis. Through simulation experiments, it was verified that the M-NSAF algorithm has the advantages of robustness against impulse and fast convergence [5]. Considering that M-NSAF algorithm may generate large offset estimation due to noise during input, Zheng and other researchers proposed to add offset compensation vector on the basis of R-NSAF algorithm. After system simulation and identification experiments, it is verified that the algorithm can have good robustness and stable performance in noise environment [6]. Wu and other scholars proposed a BRLS filter to suppress the main harmonic components in the estimated back EMF. The filter can suppress the specified harmonic components and compensate harmonic ripple and machine space wave under different steady state operating conditions, thereby improving the accuracy of rotor position estimation to a certain extent. The performance of the model built in the experiment has been verified in the operation of sensorless drivers [7]. Guo et al. proposed an adaptive fine tuning method. This method fine tuned the convolution filter by selecting a part of it. The experiment selected 7 public image datasets for classification experiments. The results show that this adaptive fine tuning method can reduce the average classification error by 2.54 % [8]. Ahmed and other researchers observed that the dynamic tuning range of the generalized integrator (GI) is limited. To solve this problem, they proposed a new GI adaptive filter, which can use coordinate transformation to maintain the same filtering characteristics of the standard GI. In addition, the model can also enhance the dynamic tuning range of the standard GI. The final experimental results also verified the improvement of the dynamic performance of GI FLL [9]. Li and other scholars deduced a new adaptive filter from the cost function. The filter uses RF to control the minimum disturbance constraint in the cost function. RF can accelerate the convergence speed of the model and obtain the optimal value. The final simulation experiment results also prove that the model built has been optimized in terms of steady-state dislocation and convergence speed [10].
Singh B. et al. proposed a distributed incremental adaptive filter and applied it to the micro electric system of the battery. The filter can control the voltage source converter and contribute photovoltaic power and battery. In addition, it can also provide harmonic suppression, load balancing and power factor improvement functions. The proposed filter can be applied to the micro electric system of public utilities and residential buildings, with strong practicality [11]. Sarma R. and other scholars used the least mean square adaptive filter to build a new pipeline architecture. This architecture uses a single multiplier to calculate the partial product and coefficient increment of each filter, and considers using the adaptive delay of the least mean square adaptive filter to pipeline the look-up table multiplier. The final implementation results show that the floor area of the proposed filter design is 60.32 % smaller, the overall power consumption of the system is reduced by 61.93 % [12]. In order to process non-circular complex signals, Wen P. and other researchers deduced an enhanced complex normalized subband adaptive filter by calculating the constraint cost function. This model can simultaneously process circular and non-circular complex signals. The final simulation results show that this algorithm can improve the mean square deviation and prediction gain [13]. Qian G et al. applied complex anti entropy to adaptive filtering, and built a new adaptive algorithm of maximum total complex co entropy on this basis. Simulation experiments verified that the constructed model has good stability, and can show superior algorithm performance in the example [14]. Zheng L. and other scholars have constructed an adaptive filter based on the minimum mean square and applied it to the multi track self interference cancellation system. It can minimize the error signals generated by the matching signals and multi-path signals in the minimum mean square. The simulation experiment results show that the performance of this model is better than other existing systems. Its bit error rate is 6 dB, and the appropriate amplitude is increased by 8 % [15]. Maurya A. K. and other researchers have made a detailed study on the improved LMS adaptive filter algorithm, mainly by modifying the error equation in the traditional LMS to improve the model. Compared with the traditional LMS adaptive noise elimination model, the experimental improved model has higher signal-to-noise ratio and superior performance [16].
To sum up, adaptive filter is a research hotspot in many fields. In order to adapt to a variety of noise environment, researchers have more or less improved it. These improved results show that it can show certain practical performance under different application conditions. However, the experiment on alleviating noise interference during signal input in wireless sensor network has not achieved satisfactory progress. The research of adaptive filter in signal enhancement of sensor network is also insufficient. Therefore, this experiment discusses this kind of situation and proposes an adaptive filter to enhance the sensor network signal. On this basis, according to the characteristics of the distributed structure of wireless sensors, a fusion adaptive weighted distributed filtering algorithm is constructed. Simulation experiments were carried out to verify the performance of the proposed model.
2. Research on signal enhancement model of wireless sensor network based on adaptive filter
2.1. Research on application model based on adaptive filtering algorithm
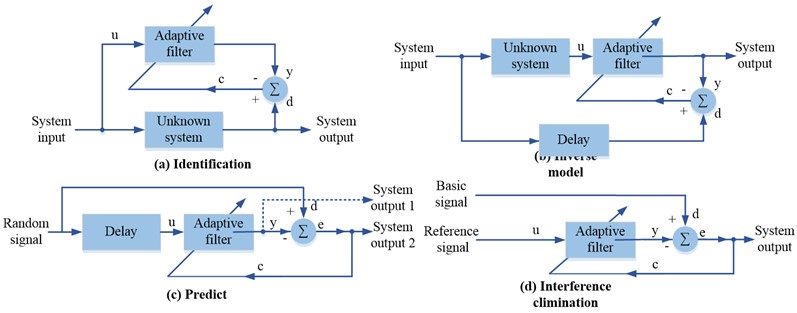
Traditional filters are divided into high pass filter, low pass filter, band stop filter and band pass filter, which can respectively pass signals corresponding to different frequency components. The advantage of the adaptive filter over the traditional filter is that the adaptive filter can automatically update its own parameters through the adaptive filtering algorithm in an unknown environment, and the weight coefficient vector of the filter will also be automatically adjusted in time, thus effectively tracking the time-varying characteristics of the input signal. The adaptive filter has great correlation with its parameters and signal data, so the filter can be divided into linear system and nonlinear system according to whether its “input output” meets the superposition principle [17]. Linear adaptive filtering algorithm mainly consists of normal filtering process and adaptive process. The filtering algorithm first outputs the input signal normally, and then feeds back some parameters of the previous output to the next input for adaptive process [18]. The two processes cooperate and influence each other. Adaptive filters are used in identification, inverse model, prediction and interference elimination because of their strong adaptability to complex environments. Fig. 1 shows the four application types of adaptive filters.
The classical adaptive filtering algorithms are divided into three basic types: least mean square algorithm (LMS), recursive least square algorithm (RLS) and radial projection algorithm (AP). Among them, the least mean square is the most widely used in practice because of its small amount of calculation and simple algorithm form. This method mainly reduces the complexity of the algorithm by modifying the gradient vector of the objective function. The core idea of LMS is the steepest descent method, which is mainly divided into filter output, estimation error and filter tap weight update. For the output of the filter, its equation can be expressed as:
where, represents the output signal of the filter, represents the input signal of the filter, and represents the weight coefficient of the filter. If is defined as error signal and as expected signal, there is a equation:
Fig. 1Four basic application types of adaptive filters
Eq. (2) represents the error signal of the filter. Taking the minimum mean square value of the error signal as the optimal criterion, the cost function can be expressed as:
where, represents the cost function, and its change over time can be used to represent the convergence rate and convergence accuracy of the filter. When the value of is the smallest, it means that the weight coefficient of the filter is optimal. The adjustment of the filter weight vector can be realized by the steepest descent method, that is, along the negative gradient direction of the performance surface. Search the minimum point in the performance surface to solve the optimal weight vector. The adjusted weight vector equation can be updated as follows:
where, represents the step convergence factor of the filter. When the value of is large, the convergence speed of the algorithm is fast but accompanied by large steady-state error; When the value of is small, the convergence speed of the algorithm is small but the steady-state error will be reduced. It can be seen that the value of directly affects the performance of the algorithm. To balance the steady state error of the filter with the convergence speed, the step factor needs to be conditionally constrained:
Eq. (5) represents the constraint condition of step factor , where represents the order of the filter and represents the maximum value of the power spectral density of the input signal. LMS adaptive filter contains two basic processes: filtering and adaptation, which form a feedback loop, and its operation is simple and easy to implement. Compared with LMS algorithm, RLS algorithm has more computation and faster convergence speed. After the optimal weight coefficient vector is also solved, the approximate equation is obtained through LS criterion:
where, represents the forgetting factor, whose value range is from 0 to 1, and is a matrix of . The iterative equation of the filter weight coefficient vector of RLS is:
Eq. (7) shows the complex operation property of RLS algorithm. During its iteration, addition, multiplication and 1 division are required for real signal. For complex signals, addition, multiplication and 1 division are required. The AP algorithm is applicable to adaptive filters when the input signals are highly correlated. Compared with LMS algorithm and RLS algorithm, AP algorithm has the advantage of “memory”. It can not only use the current input signal, but also reuse the input signal at a certain time in the past. The data input matrix is as follows:
where, represents the matrix of order , represents the length of the filter, and represents the number of times the AP algorithm uses data. The AP algorithm takes the expectation vector equal to the product of the input matrix and the weight vector as the constraint condition to minimize . The weight coefficient vector iteration equation of AP algorithm is expressed as:
where, represents the error vector. In order to avoid that the denominator value in Eq. (9) is 0, the regularization parameter is introduced. At the same time, the step factor is introduced to reduce the steady state error of the algorithm, so the weight coefficient vector iteration equation of the AP algorithm can be transformed into:
where, the value range of step factor is 0 to 2. The above three algorithms are the classical types of adaptive filters, and they have their own advantages. The theory of adaptive filter has been developing and improving constantly, and its application in the field of communication has always been exclusive. In order to better deal with the input signal interfered by noise, a deviation compensated normalized cross entropy algorithm (BCNMCC) is proposed to suppress the input noise signal, which is especially suitable for non Gaussian noise environment.
2.2. Construction of signal enhancement model of wireless sensor network combined with adaptive filter
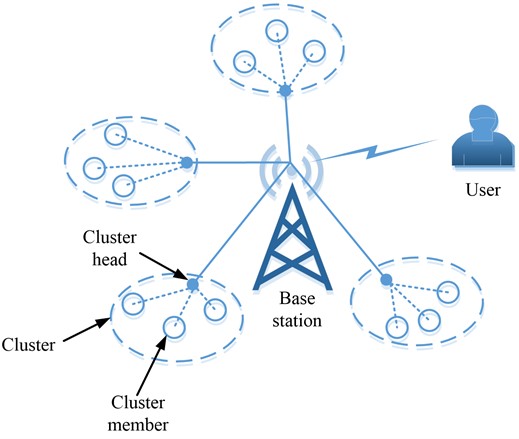
Wireless Sensor Network (WSN) is a distributed communication network that deploys a large number of energy constrained sensor nodes, with the characteristics of multi hop and self-organization. Wireless sensor networks are widely used in military, medical, industrial and detection fields. Figure 2 shows the topology of a wireless sensor network, which uses clustering routing to divide the network into several sets of network nodes with some association [19]. The signal enhancement of wireless sensor network can be realized by using the adaptive beam formed by the adaptive filtering algorithm. The adaptive filtering algorithm can adjust the different weights of each signal in the wireless sensor to improve the output signal-to-noise ratio of the wireless sensor. The algorithm can suppress the interference signal by adjusting the weight adaptively, so as to enhance the expected signal.
Fig. 2Topology of wireless sensor networks
Wireless sensor network is a distributed network. In view of this feature, the experiment proposes an adaptive consumption based linear distributed filtering (ACLDF) algorithm, which integrates adaptive weighting, to better meet the needs of wireless sensor networks for improving estimation accuracy and enhancing signals. Distributed estimation algorithm has the characteristics of fast convergence, high estimation accuracy, strong robustness, etc. Many researchers have made research on this, and the experiment will carry out a comparative study of algorithm performance [20]. Considering the possible packet loss in sensor networks, the support relationship between sensor nodes' measurement data is defined first, and the support is linearly weighted to obtain the estimation confidence of each node to the target. After that, the fusion weight composed of the reliability is introduced into the consistency principle of the node state estimation to dynamically adjust the weight. Suppose that an existing wireless sensor network containing sensors is in the target system interfered by a Gaussian noise at the moment, and the state model and observation model of the system are:
where, represents a binary random value. When is used, it indicates that the data packet of node is lost. it represents the state vector of the system at time , and represents the observation vector of sensor node at time . represents the system state transition matrix, and represents the observation matrix of sensor node . represents the process noise of the system at time , and represents the observation noise of sensor node at time . The calculation equation of node importance of sensor network is:
where, represents the number of shortest paths passing through node , and represents the centrality of node . If the value of is larger, it means that the node has greater influence on the network and is more important in the network. The support equation between two nodes can be expressed as:
Eq. (13) represents the relative distance between the state estimates of node and node in the sensor network. The smaller the value of is, the smaller the difference between the state estimates of the two nodes at time is, and the higher the mutual support is. The support equation of node in the whole network can be expressed as:
where, represents the support degree of node and other nodes, and is a group of negative parameters obtained from the normalization of node importance of node in the sensor network. The gain matrix of each sensor node in the network can be expressed as:
where, represents the state transition matrix, and is the system process noise covariance matrix. represents the sensor node observation matrix, and represents the parameter, whose value range is 0.2 to 0.8. The sensor network with adaptive weighted distributed filtering algorithm is as shown above. The model considers the attributes of the node itself and its influence in the network, and linearly weights the importance and support of the node to obtain the estimation confidence of each sensor node to the target. The fusion weight composed of the reliability is introduced into the estimation value of the target state by the sensor node to improve the estimation accuracy of the filtering algorithm. Next, the experiment will verify the estimation accuracy of the model and the signal enhancement effect on wireless sensor networks.
3. Performance analysis of wireless sensor network signal enhancement model based on adaptive filter
3.1. Comparative analysis of adaptive filter performance
To verify the performance advantage of the adaptive filter over the traditional filter, a sine signal with a frequency of 2 kHz is set in the experiment, as shown in Fig. 3(a). It is assumed that the signal is interfered by noise during its transmission to form a useful interfered signal, which is used as the input signal of traditional filter and adaptive filter, as shown in Fig. 3(b).
Fig. 3Experimental signal setting
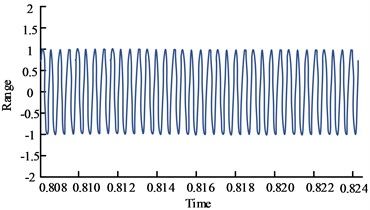
a) Useful signal (2 kHz sine signal)
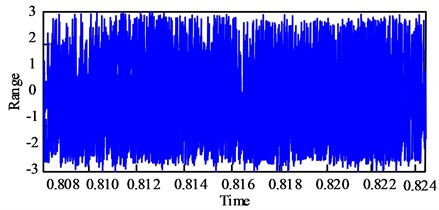
b) Disturbed useful signal
In this study, Matlab platform was used for experiments, that is, the signal interfered by random noise was input into the traditional filter and adaptive filter based on Matlab platform, and the noise cancellation effect was observed. The signal affected by noise in Fig. 3(b) was interfered by traditional filter and adaptive filter, and the experimental results shown in Fig. 4 were obtained. It is not difficult to find from the results in the figure that the signal curve obtained by the adaptive filtering algorithm after noise elimination is smoother and more stable than that of the traditional filter, and its fluctuation amplitude is more balanced. The results show that both filtering algorithms can eliminate noise to a certain extent, but the effect of traditional filter is much weaker than that of adaptive filter. The main reason is that the adaptive filter can adjust the weight coefficient adaptively according to the algorithm to cope with various unknown environments, so it has better noise elimination and filtering effect than the traditional filtering algorithm.
Fig. 4Comparison of noise cancellation effects between two filters
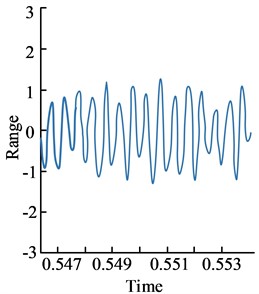
a) Output result of traditional filter
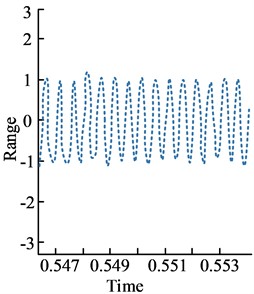
b) Output result of adaptive filter
Fig. 5Convergence performance of four algorithms under different pulse intensities
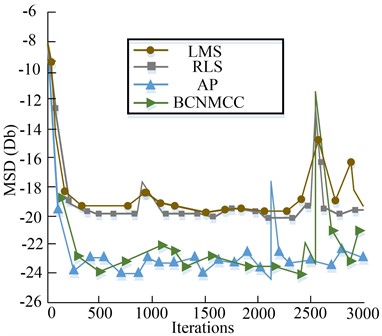
a) Small pulse measurement noise
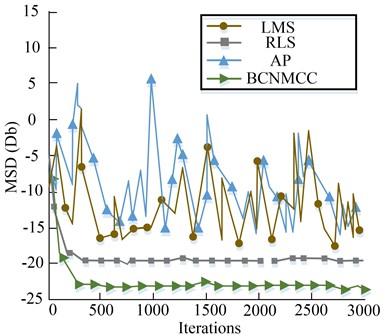
b) Strong pulse measurement noise
Subsequently, the performance of the above three adaptive filtering algorithms (LMS, RLS, AP) and the improved BCNMMC algorithm based on them is verified by experiments. Fig. 5 shows the simulation results of four adaptive filters at different pulse noise levels. Fig. 5(a) shows the convergence performance of the algorithm in the environment of small impulse noise, and Fig. 5(b) shows the convergence performance of the algorithm in the environment of strong impulse noise. In the case of small pulses, RLS and AP have relatively smooth accuracy. The peak value of the experiment appeared at about 2500 iterations, which was probably caused by pulse interference. The RLS and BCNMCC adaptive filtering algorithms have good stability and convergence in the case of strong pulse. In addition, the steady-state accuracy of AP and BCMCC is lower than that of the other two algorithms when the convergence rate is the same.
Table 1 summarizes the comparative advantages of the four adaptive filtering algorithms. Among them, the three classical traditional algorithms can occupy some advantages, and the BCNMC algorithm proposed by relevant research integrates these advantages more comprehensively, which can have better adaptability in the noise environment of non-Gaussian measurement, and can effectively suppress the deviation caused by input noise. It can be seen that the adaptive algorithm filtering algorithm has a strong function in eliminating the noise of the input signal, and has a good applicability in network signal enhancement.
Table 1Comparison of advantages of four adaptive filtering algorithms
Improved adaptive algorithm | Three basic algorithms | ||
LMS | RLS | AP | |
BCNMC | Better adaptability in non-Gaussian noise environment; Effectively suppress the deviation caused by input noise | Effectively suppress the deviation caused by input noise | Better adaptability in non-Gaussian noise environment |
3.2. Performance verification of wireless sensor network signal enhancement model of adaptive filter
According to the distributed characteristics of sensor networks, this paper proposes a distributed filtering algorithm based on adaptive filtering algorithm (ACLDF), which integrates adaptive weighting. In the simulation experiment, 30 sensors are randomly scattered in a square area of 400 m2, with an effective network communication radius of 8m. The parameter settings of the system matrix are shown in Table 2. In order to better compare the performance of the proposed model, the experiment selects the consistent linear distributed filtering (CLDF) algorithm and the consistent filtering with packet dropping (CFPD) algorithm for comparison and verification.
Table 2Simulation experiment parameter setting
Parameter | Value | Parameter | Value |
Number of sensors | 30 | Noise covariance matrix | |
The measure of area | 20×20 m2 | Initial condition | |
Communication radius | 8 m | Sensor node observation matrix | |
Status value | [10, 15] | Parameter c1, c2 | |
State transition matrix | Iterative steps of algorithm | 300 |
Fig. 6 shows the comparison results of sensor node estimation errors under ideal conditions. It can be seen from the figure that in this state, the curve of ACLDF proposed by the experiment is more smooth, which shows that its estimation performance is better than the other two algorithms. The main reason for this result is that the ACLDF algorithm can uniformly process the estimated values obtained by the filter, which improves the estimation accuracy of sensor nodes to a certain extent. Therefore, the estimation error of ACLDF is smaller than that of the other two algorithms, and it has faster convergence speed.
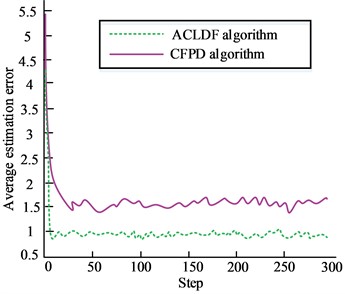
Fig. 7 shows the estimation error results when any three nodes in the network are attacked under the random attack mode. In this mode, the ACLDF algorithm can improve the estimation accuracy of the entire sensor network and the state estimation value of each sensor network node, so that the estimated value of network nodes can be more closely distributed near the true value. The improvement of its estimation accuracy and algorithm performance is conducive to promoting the performance of sensor networks, including noise processing and other aspects, to a certain extent, is conducive to the enhancement of its network signal.
Fig. 6Comparison effect of node estimation error
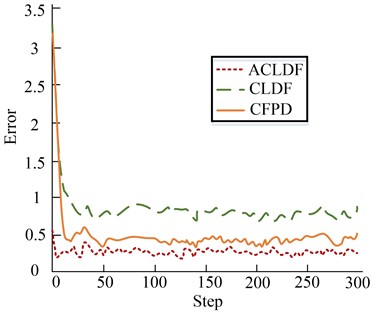
a) Comparison chart of estimation error
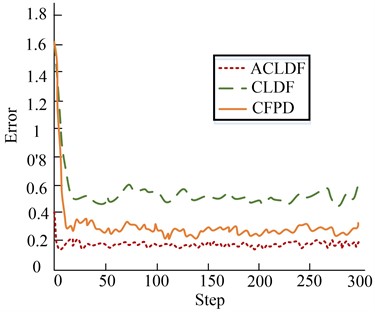
b) Comparison chart of inconsistent estimation error
Fig. 7Comparison of average estimation error of network nodes under random attack mode
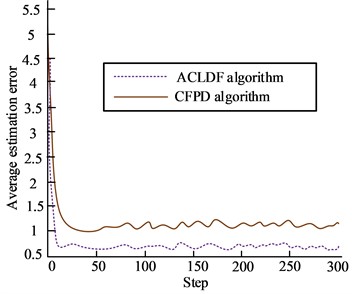
a) Comparison chart of average estimation error under random attack mode
b) Comparison chart of inconsistent average estimation error under random attack mode
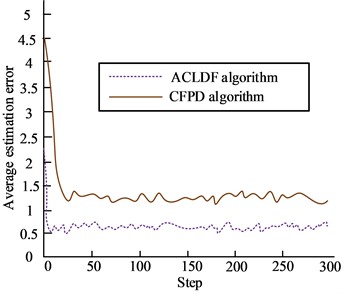
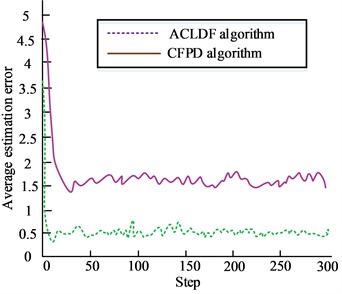
Fig. 8Comparison of average estimation error of each node under selective attack mode
a) Comparison chart of average estimation error under selective attack mode
b) Comparison chart of inconsistent average estimation error under selective attack mode
At the end of the experiment, the nodes of the sensor network are sorted according to the degree of confidence, and three networks with high degree of confidence are selected to attack. The experimental results are shown in Fig. 8. It can be seen from the figure that the ACLDF algorithm can reduce the estimation error of the algorithm and improve the estimation accuracy of the model to a certain extent, and the state estimation values of each node in the sensor network can be more closely distributed near the real value. When some important nodes in sensor networks are attacked, selective attacks can cause greater impact than random attacks. This shows that in practical applications, it is necessary to increase the maintenance of network nodes with high confidence, and ensure the stability of sensor network signals while maintaining good network estimation accuracy. The sensor network with strong anti attack capability is conducive to the stability and enhancement of its network signal, and can maintain an efficient working state.
4. Conclusions
Wireless sensor networks have attracted much attention in military, medical, detection and other fields. In recent years, domestic and foreign researches have explored wireless sensor networks and made them constantly updated and improved in the process of development. Adaptive filtering algorithm is also highly valued in the field of intelligence science, because of its strong practicability is also used in various industries. In order to enhance the signal of wireless sensor network, adaptive filter is proposed to be integrated into wireless sensor network in order to improve the signal of wireless sensor network. Finally, according to the characteristics of the distributed structure of wireless sensors, a distributed filtering algorithm based on fusion adaptive weighting is constructed. Then the simulation experiment was carried out, and the simulation experiment results showed that:
1) Comparing the noise elimination effect of traditional filter and adaptive filter, the results show that adaptive filter has better performance advantage than traditional filter because it can adjust parameters spontaneously with the change of environment, which is conducive to the enhancement of network signal.
2) The experiment verifies the performance of three classical adaptive filter algorithms and an improved BCNMMC algorithm. The results show that among the four algorithms, the improved algorithm has relatively comprehensive advantages. In other words, BCNMMC can have better adaptability in non-Gaussian noise environment, and can effectively suppress the deviation caused by input noise.
3) Finally, ACLDF was verified in the experiment. The results show that the ACLDF algorithm can improve the estimation accuracy of the model to a certain extent, and it is concluded that the nodes with high certainty need to be maintained to maintain the anti-attack capability of the network, so as to maintain the stability and enhancement of the network signal.
This experiment has achieved the expected effect, but there is still a lack of reliability analysis of the algorithm, the subsequent research can start from here.
References
-
Q. Liu and Y. He, “Robust Geman-McClure based nonlinear spline adaptive filter against impulsive noise,” IEEE Access, Vol. 8, pp. 22571–22580, 2020, https://doi.org/10.1109/access.2020.2969219
-
T.-L. Le, T.-T. Huynh, and C.-M. Lin, “Adaptive filter design for active noise cancellation using recurrent type-2 fuzzy brain emotional learning neural network,” Neural Computing and Applications, Vol. 32, No. 12, pp. 8725–8734, Jun. 2020, https://doi.org/10.1007/s00521-019-04366-8
-
S. Singha Roy and S. Barman, “A non-invasive cancer gene detection technique using FLANN based adaptive filter,” Microsystem Technologies, Vol. 27, No. 2, pp. 463–478, Feb. 2021, https://doi.org/10.1007/s00542-018-4036-6
-
S. Mula, V. C. Gogineni, and A. S. Dhar, “Robust proportionate adaptive filter architectures under impulsive noise,” IEEE Transactions on Very Large Scale Integration (VLSI) Systems, Vol. 27, No. 5, pp. 1223–1227, May 2019, https://doi.org/10.1109/tvlsi.2019.2892383
-
W. Wang, H. Zhao, L. Lu, and Y. Yu, “Robust nonlinear adaptive filter based on kernel risk-sensitive loss for bilinear forms,” Circuits, Systems, and Signal Processing, Vol. 38, No. 4, pp. 1876–1888, Apr. 2019, https://doi.org/10.1007/s00034-018-0928-z
-
Y. Yu, H. He, B. Chen, J. Li, Y. Zhang, and L. Lu, “M-estimate based normalized subband adaptive filter algorithm: Performance analysis and improvements,” IEEE/ACM Transactions on Audio, Speech, and Language Processing, Vol. 28, No. 28, pp. 225–239, 2020, https://doi.org/10.1109/taslp.2019.2950597
-
Z. Zheng, Z. Liu, and X. Lu, “Robust normalized subband adaptive filter algorithm against impulsive noises and noisy inputs,” Journal of the Franklin Institute, Vol. 357, No. 5, pp. 3113–3134, Mar. 2020, https://doi.org/10.1016/j.jfranklin.2020.02.032
-
Xuan Wu et al., “Enhanced position sensorless control using bilinear recursive least squares adaptive filter for interior permanent magnet synchronous motor,” IEEE Transactions on Power Electronics, Vol. 1, No. 35, pp. 681–698, 2020.
-
Yunhui Guo, Yandong Li, Liqiang Wang, Tajana Rosing, “Adafilter: adaptive filter fine-tuning for deep transfer learning,” inProceedings of the AAAI Conference on Artificial Intelligence, Vol. 4, No. 34, pp. 4060–4066, 2020.
-
H. Ahmed and M. Benbouzid, “On the enhancement of generalized integrator-based adaptive filter dynamic tuning range,” IEEE Transactions on Instrumentation and Measurement, Vol. 10, No. 69, pp. 7449–7457, 2020.
-
Li Zhoufan, Li Dan, Xu Xinlong, and Zhang Jianqiu, “New normalized LMS adaptive filter with a variable regularization factor,” Journal of Systems Engineering and Electronics, Vol. 2, No. 30, pp. 259–269, 2019.
-
Bhim Singh and Shailendra Kumar, “Distributed incremental adaptive filter controlled grid interactive residential photovoltaic-battery based microgrid for rural electrification,” IEEE Transactions on Industry Applications, Vol. 4, No. 56, pp. 4114–4123, 2020.
-
R. Sarma, M. Khan, R. Shaik, and J. Hazarika, “A novel time-shared and lut-less pipelined architecture for lms adaptive filter,” IEEE Transactions on Very Large Scale Integration (VLSI) Systems, Vol. 1, No. 28, pp. 188–197, 2019.
-
P. Wen, J. Zhang, S. Zhang, and D. Li, “Augmented complex-valued normalized subband adaptive filter: Algorithm derivation and analysis,” Journal of the Franklin Institute, Vol. 356, No. 3, pp. 1604–1622, Feb. 2019, https://doi.org/10.1016/j.jfranklin.2018.11.013
-
Guobing Qian, Shiyuan Wang, and H. Iu, “Maximum total complex correntropy for adaptive filter,” IEEE Transactions on Signal Processing, No. 68, pp. 978–989, 2020.
-
L. Zheng, Z. Liu, S. Xiao, M. P. Fok, Z. Zhang, and W. Hu, “Hybrid wideband multipath self-interference cancellation with an LMS pre-adaptive filter for in-band full-duplex OFDM signal transmission,” Optics Letters, Vol. 45, No. 23, pp. 6382–6385, Dec. 2020, https://doi.org/10.1364/ol.405778
-
A. K. Maurya, P. Agrawal, and S. Dixit, “Modified model and algorithm of LMS adaptive filter for noise cancellation,” Circuits, Systems, and Signal Processing, Vol. 38, No. 5, pp. 2351–2368, May 2019, https://doi.org/10.1007/s00034-018-0952-z
-
C.-H. Lee, B. D. Rao, and H. Garudadri, “A sparse conjugate gradient adaptive filter,” IEEE Signal Processing Letters, Vol. 27, No. 27, pp. 1000–1004, 2020, https://doi.org/10.1109/lsp.2020.3000459
-
Z. Yue, B. Lian, and Y. Gao, “Robust adaptive filter using fuzzy logic for tightly‐coupled visual inertial odometry navigation system,” IET Radar, Sonar and Navigation, Vol. 3, No. 14, pp. 364–371, 2020.
-
Saiful Islam and Uipil Chong, “Rotating machine fault detection based on fuzzy logic and improved adaptive filter,” International Journal of Mechanical Engineering and Robotics Research, Vol. 2, No. 10, pp. 79–86, 2021.
-
A. Mohammed Kaleem and R. D. Kokate, “A survey on FECG extraction using neural network and adaptive filter,” Soft Computing, Vol. 25, No. 6, pp. 4379–4392, Mar. 2021, https://doi.org/10.1007/s00500-020-05447-w
About this article

The authors have not disclosed any funding.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
The authors declare that they have no conflict of interest.
