Abstract
The planetary-type vibration exciters are relatively novel and prospective types of actuators for various vibratory technological equipment. Numerous research papers substantiated the possibilities of implementing such exciters for generating circular, elliptical, and rectilinear oscillations of the working members of different technological machines. The present research continues the authors’ previous investigations dedicated to kinematics and dynamics of planetary-type vibration exciters and is focused on the analysis of forces, moments, and torques acting upon the elements of the corresponding actuating mechanisms. The research methodology contains the development of the simplified dynamic diagrams of two different designs of planetary-type mechanisms, derivation of the analytical expressions describing force parameters of the considered mechanical systems, performing the mathematical modeling and computer simulation of the mechanism motion in order to analyze the corresponding forces, moments, and torques. The obtained results present the time dependencies of the mentioned force parameters under different operational conditions and design parameters of the planetary-type mechanism. The major scientific novelty of the paper consists in defining the minimal required torque of the motor needed to be applied for driving the mechanism at different conditions. The research outcomes can be effectively used by engineers while developing new and improving existent vibratory technological machines equipped with the considered planetary-type vibration exciter.
Highlights
- Two planetary-type mechanisms with internal and external gearing used for actuating inertial vibration exciters of various vibratory technological equipment are considered.
- The expressions describing their kinematic and force characteristics are deduced allowing for evaluating the reactions in the hinges and the moment of the forces acting upon the carrier.
- The obtained results present the time dependencies of the mentioned force parameters under different operational conditions and design parameters of the planetary-type mechanism.
1. Introduction
Modern vibratory technological equipment uses various types of vibration exciters, which differ by design parameters and operation peculiarities. One of the simplest designs is based on the crank-type mechanism that actuates the reciprocating screen or sieve [1]. Another type of commonly used vibration exciters uses the centrifugal forces generated due to the rotation of the imbalanced shafts [2]. An interesting design of the twin crank-slider excitation mechanism is proposed in [3]. The possibilities of implementing multi-rotor systems with one active drive for actuating vibratory technological machines are thoroughly studied in [4] and [5]. Another prospective design of the inertial vibration exciter is based on the ball-type actuators [6]. The paper [7] considers the peculiarities of implementing the double-rotor exciters and nonlinear springs in vibratory systems. In [8], the authors study the dynamic behavior of the mobile robot equipped with the enhanced pantograph-type suspension and imbalanced rotor. The use of the crank-type exciter for actuating the vibratory screening conveyor is analyzed in [9].
The planetary-type vibration exciters are relatively novel and prospective types of actuators for various vibratory technological equipment. The possibilities of providing the time-varying operational characteristics of the planetary gears are comprehensively investigated in [10]. The influence of different dynamic parameters on the vibration response of these gears is considered in [11]. The paper [12] analyzes the main working regimes of the novel planetary-type vibration exciter. In [13], the authors study the dynamics of an enhanced adjustable planetary-type exciter driven by the chain gear. The modeling of torsional vibrations of the planetary gear train is performed in [14], where the corresponding frequency spectrum analysis is conducted.
The present research continues the authors’ previous investigations published in [15]-[17]. The generalized design of an asymmetric self-adjustable planetary-type vibration exciter was initially proposed in [15]. Further investigations were focused on the simplified symmetric design of the exciter allowing for generating the controllable circular, elliptical, and rectilinear trajectories of the single-mass oscillating systems [16]. The latest research results published in [17] were dedicated to kinematic analysis of the planetary-type mechanism that can be used as a vibration exciter of various vibratory technological machines. The present research is focused on the analysis of forces, moments, and torques acting upon the elements of the previously considered planetary-type mechanisms. Herewith, the major scientific novelty of the paper consists in defining the minimal required torque of the motor needed to be applied for driving the mechanism at different operational conditions and design parameters of the vibration exciter.
2. Research methodology
2.1. Dynamic diagrams of the planetary-type mechanisms of the enhanced vibration exciters
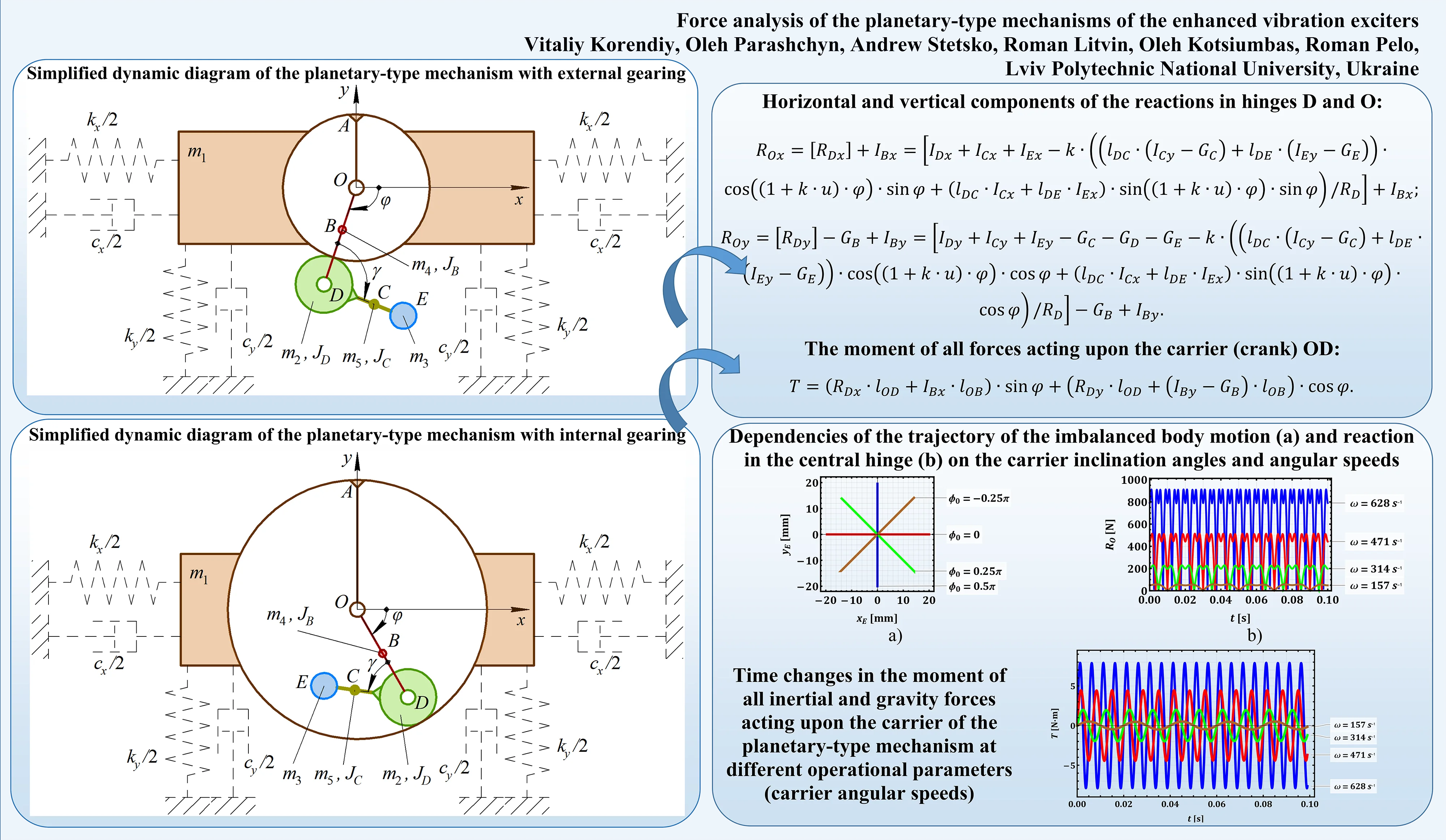
The simplified dynamic diagrams of the planetary-type mechanisms used for actuating vibration exciters are presented in Figs. 1 and 2. Considering the design with an external gearing (Fig. 1), when the planet gear rolls over the unmovable sun gear, the carrier is set into rotary motion in a clockwise direction around the hinge . The latter is fixed on the machine’s working member and is chosen to be the origin of the inertial reference frame . The angular position of the carrier at an arbitrary moment of time is characterized by the angle . Depending on the geometrical parameters of the mechanism, the angular position of the planet gear and the imbalanced body can be unambiguously expressed in terms of the angle . The inertial parameters of the considered mechanical system are characterized by the masses , , , , of the working member, planet gear, imbalanced body, carrier, and connecting rod, respectively. In addition, while performing further dynamic analysis, the moments of inertia of the corresponding bodies are considered relative to their centers of mass: , , .
Fig. 1Simplified dynamic diagram of the planetary-type mechanism with external gearing
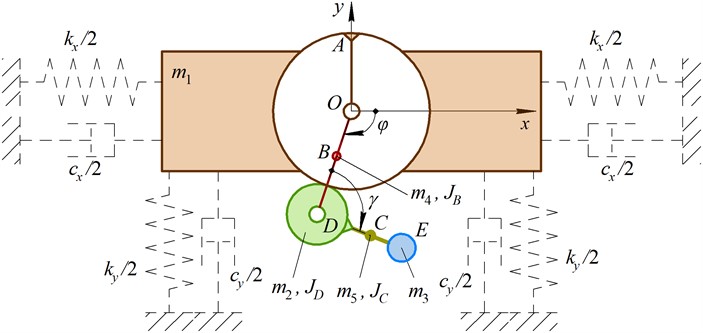
Similarly to the previously considered dynamic diagram, the mechanism with internal gearing (Fig. 2) is characterized by eight inertial parameters and two angles unambiguously defining the positions of all the movable elements in the inertial reference frame . The only distinction is the opposite direction of rotation of the planet gear caused by the clockwise rotation of the carrier. While performing further analysis, let us consider the case when the mechanisms’ geometrical and inertial parameters are prescribed, and the angle is the known (pregiven) function of time . Particularly, the case of constant angular speed of the carrier is to be studied.
Fig. 2Simplified dynamic diagram of the planetary-type mechanism with internal gearing
2.2. Analytical expressions defining kinematic and dynamic parameters of the mechanisms
According to the considered dynamic diagrams, the relation between the angles and , and the coordinates of the mass centers of the movable bodies can be expressed as follows:
where , , , are the distances between the corresponding points; is the pitch radius of the planet gear; is the coefficient defining the type of the planetary-type mechanism: for the mechanism with external gearing and --1 for the mechanism with internal gearing; is the substitution made for reducing the expressions length.
The horizontal and vertical components of speeds and accelerations of the corresponding mass centers can be derived as follows:
The inertial and gravitational forces acting upon the mass centers are the following:
where is free-fall acceleration.
The horizontal and vertical components of the reactions in hinges and are equal to:
The moment of all forces acting upon the carrier (crank) gives the primary information about the torque of the motor needed to be applied in the hinge for actuating the mechanism:
3. Results and discussion
3.1. Analyzing the reactions in the central hinges of the mechanisms
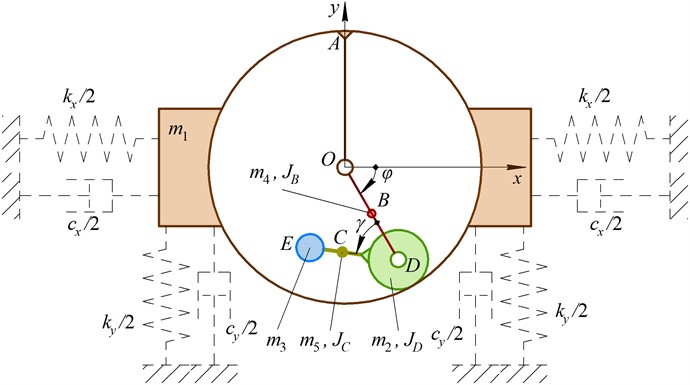
In order to perform further numerical modeling, let us consider the simplified case of the carrier uniform rotation at the constant angular speeds of 157, 314, 471, 628 s-1 (rotational frequencies of 25, 50, 75, 100 Hz), when the mass of the imbalanced body is equal to 0.1 kg and its eccentricity is 0.01 m. Herewith, all the other inertial parameters of the system are neglected and assumed to be zero: 0. The latter assumption can be proved when the vibration exciter is equipped with at least two symmetrically installed planet gears and synchronized imbalanced rotors. In addition, let us study three basic cases: 1) the imbalanced body describes a rectilinear trajectory in a vertical direction (e.g. while performing compacting processes); 2) in a horizontal direction (e.g., while conducting sieving processes); 3) in an inclined direction (e.g., while carrying out conveying processes). These three cases can take place when the geometrical parameters , , and are equal [17]: 0.01 m. The corresponding trajectories can be generated at the following initial values of the angles and : 1) , ; 2) , ; 3) (), .
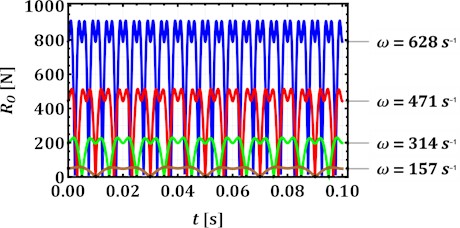
Considering the imbalanced body trajectories (Fig. 3(a)) simulated in the Mathematica software with the help of Eq. (6-7), while performing further investigations, let us analyze the first case when the imbalanced body describes a rectilinear trajectory in a vertical direction (e.g. while performing compacting processes). The corresponding time dependence characterizing the changes in the reaction of the central hinge of the mechanism with internal gearing at different angular speeds of the carrier is presented in Fig. 3(b). The lowest nominal values of the reaction of about 50 N are observed at the smallest angular speed of 157 s–1 (25 Hz), while the highest values of the reactions reach 900 N at the forced frequency of 628 s–1 (100 Hz).
Fig. 3Dependencies of the trajectory of the imbalanced body motion a) and reaction in the central hinge b) on the initial conditions (carrier inclination angles) and operational parameters (carrier angular speeds)
a)
b)
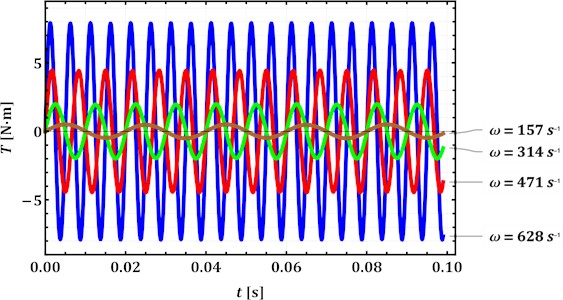
Fig. 4Time changes in the moment of all inertial and gravity forces acting upon the carrier of the planetary-type mechanism at different operational parameters (carrier angular speeds)
3.2. Analyzing the moment of all inertial and gravity forces acting upon the carrier
Considering the above-mentioned design and operational parameters of the planetary-type mechanism and the derived Eq. (26) of the moment of all forces acting upon the carrier, the corresponding time dependence is plotted in Fig. 4. The obtained simulation results show that the moment is a periodic function that changes in time at the twice larger frequency than the rotational frequency of the carrier. The maximal amplitude values of the moment of about 7 N∙m are reached at the forced frequency of 628 s–1 (100 Hz), while the minimal ones of approximately 0.5 N∙m are observed at the lowest angular speed of the carrier of 157 s–1 (25 Hz). The obtained data agree with the previous publications of the authors, e.g. [16], [17], and allow for primary evaluation of the necessary torque and power of the motor to be applied for actuating the excitation mechanism.
4. Conclusions
The paper considers two planetary-type mechanisms with internal and external gearing used for actuating inertial vibration exciters of various vibratory technological equipment. The corresponding dynamic diagrams are analyzed and the expressions describing their kinematic and force characteristics are deduced. The latter allow for evaluating the reactions in the hinges of the mechanisms and the moment of inertial and gravity forces acting upon the carrier. Considering the case of vertical rectilinear motion of the imbalanced body, the highest and lowest values of the reaction in the central hinge and the torque at the carrier are simulated: 50 N and 0.5 N∙m (at the carrier angular speed of 157 s–1 (25 Hz)), 900 N and 7 N∙m (at 628 s–1 (100 Hz)). Further research should be focused on experimental approval of the obtained simulation results.
References
-
H. Li, C. Liu, L. Shen, and L. Zhao, “Vibration characteristics of an industrial-scale flip-flow screen with crank-link structure and parameters optimization,” Shock and Vibration, Vol. 2021, pp. 1–16, Sep. 2021, https://doi.org/10.1155/2021/2612634
-
N. Yaroshevich, O. Yaroshevych, and V. Lyshuk, “Drive dynamics of vibratory machines with inertia excitation,” Mechanisms and Machine Science, Vol. 95, pp. 37–47, Mar. 2021, https://doi.org/10.1007/978-3-030-60694-7_2
-
V. Korendiy, V. Gursky, P. Krot, and O. Kachur, “Dynamic analysis of three-mass vibratory system with twin crank-slider excitation mechanism,” Vibrations in Physical Systems, Vol. 34, No. 2, pp. 2023226-1–2023226-9, Jan. 2023, https://doi.org/10.21008/j.0860-6897.2023.2.26
-
V. Gurskyi, V. Korendiy, P. Krot, R. Zimroz, O. Kachur, and N. Maherus, “On the dynamics of an enhanced coaxial inertial exciter for vibratory machines,” Machines, Vol. 11, No. 1, p. 97, Jan. 2023, https://doi.org/10.3390/machines11010097
-
W. Kang, P. Fang, Q. Yuan, Y. Hou, X. Jian, and H. Wang, “Synchronization and vibration absorption analysis of a dual-body vibrating screen driven by multiple motors with double-frequency actuation,” Proceedings of the Institution of Mechanical Engineers, Part C: Journal of Mechanical Engineering Science, pp. 1–19, Nov. 2023, https://doi.org/10.1177/09544062231200609
-
V. Yatsun, G. Filimonikhin, I. Filimonikhina, and A. Haleeva, “Determining the energy efficiency of a resonance single-mass vibratory machine whose operation is based on the Sommerfeld effect,” Eastern-European Journal of Enterprise Technologies, Vol. 5, No. 7(113), pp. 44–51, Oct. 2021, https://doi.org/10.15587/1729-4061.2021.241950
-
M. Du, Y. Hou, C. Yu, W. Wang, D. Hou, and G. Xiong, “Experimental investigation on synchronization of two co-rating rotors coupled with nonlinear springs,” IEEE Access, Vol. 8, pp. 48226–48240, Jan. 2020, https://doi.org/10.1109/access.2020.2975590
-
V. Korendiy and O. Kachur, “Locomotion characteristics of a wheeled vibration-driven robot with an enhanced pantograph-type suspension,” Frontiers in Robotics and AI, Vol. 10, p. 1239137, Aug. 2023, https://doi.org/10.3389/frobt.2023.1239137
-
O. Kachur and V. Korendiy, “Dynamic behavior of vibratory screening conveyor equipped with crank-type exciter,” in Lecture Notes in Mechanical Engineering, pp. 44–53, May 2023, https://doi.org/10.1007/978-3-031-32774-2_5
-
Z. Xiao, J. Cao, and Y. Yu, “Mathematical modeling and dynamic analysis of planetary gears system with time-varying parameters,” Mathematical Problems in Engineering, Vol. 2020, pp. 1–9, Mar. 2020, https://doi.org/10.1155/2020/3185624
-
Y. Liu, D. Zhen, H. Zhang, H. Zhang, Z. Shi, and F. Gu, “Vibration response of the planetary gears with a float sun gear and influences of the dynamic parameters,” Shock and Vibration, Vol. 2020, pp. 1–17, Aug. 2020, https://doi.org/10.1155/2020/8886066
-
A. Kim, M. Doudkin, A. Ermilov, G. Kustarev, M. Sakimov, and M. Mlynczak, “Analysis of vibroexciters working process of the improved efficiency for ice breaking, construction and road machines,” Journal of Vibroengineering, Vol. 22, No. 3, pp. 465–485, May 2020, https://doi.org/10.21595/jve.2020.20446
-
V. V. Mikheyev and S. V. Saveliev, “Planetary adjustable vibratory exciter with chain gear,” in Journal of Physics: Conference Series, Vol. 1210, No. 1, p. 012097, May 2019, https://doi.org/10.1088/1742-6596/1210/1/012097
-
G. Huo et al., “Torsional vibration modelling of a two-stage closed differential planetary gear train,” in Mechanisms and Machine Science, Vol. 140, pp. 188–201, Aug. 2023, https://doi.org/10.1007/978-3-031-40459-7_13
-
V. Korendiy, I. Kuzio, S. Nikipchuk, O. Kotsiumbas, and P. Dmyterko, “On the dynamic behavior of an asymmetric self-regulated planetary-type vibration exciter,” Vibroengineering Procedia, Vol. 42, pp. 7–13, May 2022, https://doi.org/10.21595/vp.2022.22580
-
V. Korendiy, V. Gurey, V. Borovets, O. Kotsiumbas, and V. Lozynskyy, “Generating various motion paths of single-mass vibratory system equipped with symmetric planetary-type vibration exciter,” Vibroengineering Procedia, Vol. 43, pp. 7–13, Jun. 2022, https://doi.org/10.21595/vp.2022.22703
-
V. Korendiy, O. Parashchyn, V. Heletiy, V. Pasika, V. Gurey, and N. Maherus, “Kinematic analysis and geometrical parameters justification of a planetary-type mechanism for actuating an inertial vibration exciter,” Vibroengineering Procedia, Vol. 52, pp. 35–41, Nov. 2023, https://doi.org/10.21595/vp.2023.23728
Cited by
About this article

The authors have not disclosed any funding.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
The authors declare that they have no conflict of interest.
