Abstract
This paper considers the solution to the dynamic problem of seismically isolated buildings using the concentrated strain method. A dynamic model of a building with seismic isolation is investigated under various dynamic effects. Each mass in the dynamic model is assumed to have four degrees of freedom. The concentrated strain method is used to generate the external stiffness matrix of the studied object. Using the method of successive approximations, the system of differential equations is transformed into a system of algebraic equations, which is solved using the stepwise method. The developed computer program based on a numerical modeling algorithm is implemented using the example of a multi-story building with seismic isolation in the form of rubber-metal bearings. The results of a direct dynamic calculation of the seismically isolated building under various types of external effects are obtained.
Highlights
- A dynamic model of a multi-story seismically isolated building is developed using the concentrated strain method.
- The system accounts for longitudinal, translational, bending, and torsional movements with four degrees of freedom per mass.
- Numerical analysis confirms that rubber-metal bearings (RMB) increase the fundamental vibration period from 0.375 s to 2.45 s.
- Direct dynamic calculations using the El Centro accelerogram show a 5-fold reduction in peak horizontal accelerations.
- The proposed modeling algorithm effectively evaluates the stress-strain state of seismically isolated structures at the design stage.
1. Introduction
Seismic isolation is currently recognized as an effective means of seismic protection for buildings and engineering structures. One of the most modern approaches to seismic resistance is active seismic protection of buildings and structures, which aims to effectively reduce the intensity of seismic impacts for both existing and newly constructed buildings and structures with various structural designs and located in areas with varying engineering and seismological conditions. Active seismic protection involves reducing seismic loads on structures by regulating their dynamic characteristics during earthquake vibration. Dynamic characteristics are regulated in such a way as to avoid resonant increases in the structure's vibration amplitudes or, at least, to reduce resonant effects. Modification of the structure's natural vibration periods during earthquake vibration can be achieved through the use of special structural devices. The main idea of seismic isolation is to increase the building's fundamental period of free vibration and move it beyond the region of predominant seismic impact periods.
Today, numerous design options for seismic isolation systems are known: buildings with flexible ground floors; with kinematic supports; with suspended supports; with sliding supports; with rubber-metal supports. All types of seismic isolation systems adhere to the general principle of dividing the structure into two parts and installing seismic isolation between them.
In recent years, the development and practical application of seismic protection and seismic isolation devices (SPD) for various types of buildings, structures, and equipment, reducing the intensity of seismic loads and increasing their seismic resistance, have been extensively developed. In this area, the following works are noteworthy: [1]-[13].
Various SPD designs have been proposed, differing in their operating principle and nature of operation, and numerous theoretical and experimental studies have been conducted [12], [14], [15].
Vibrations of a linear system with a dynamic vibration damper under various laws of foundation motion were studied in [16], [17], [26]. The results obtained in these studies demonstrate the effectiveness of the dynamic vibration damper under seismic impacts.
The most effective method of seismic isolation is considered to be the use of rubber-metal bearings (RMB). The main mechanical characteristics of RMB isolators with high (HDR - high damping rubber) and low (LDR - low damping rubber) damping, as well as RMB with a lead core (LRB - lead rubber bearing) and a friction pendulum system (FPS - friction pendulum system), and a laminated rubber bearing (LRB - laminated rubber bearing) are described in detail in [15], [18], [19]. Buildings on RMB are widely used in Japan, England, Italy, Russia, France, the USA, and New Zealand. The paper [20],[35] presents the results of laboratory tests of RMB from FIP Industriale, intended for seismic isolation of the 25-story Sea Plaza complex in Sochi, conducted according to European standards [21].
2. Research methods
2.1. Mathematical modeling
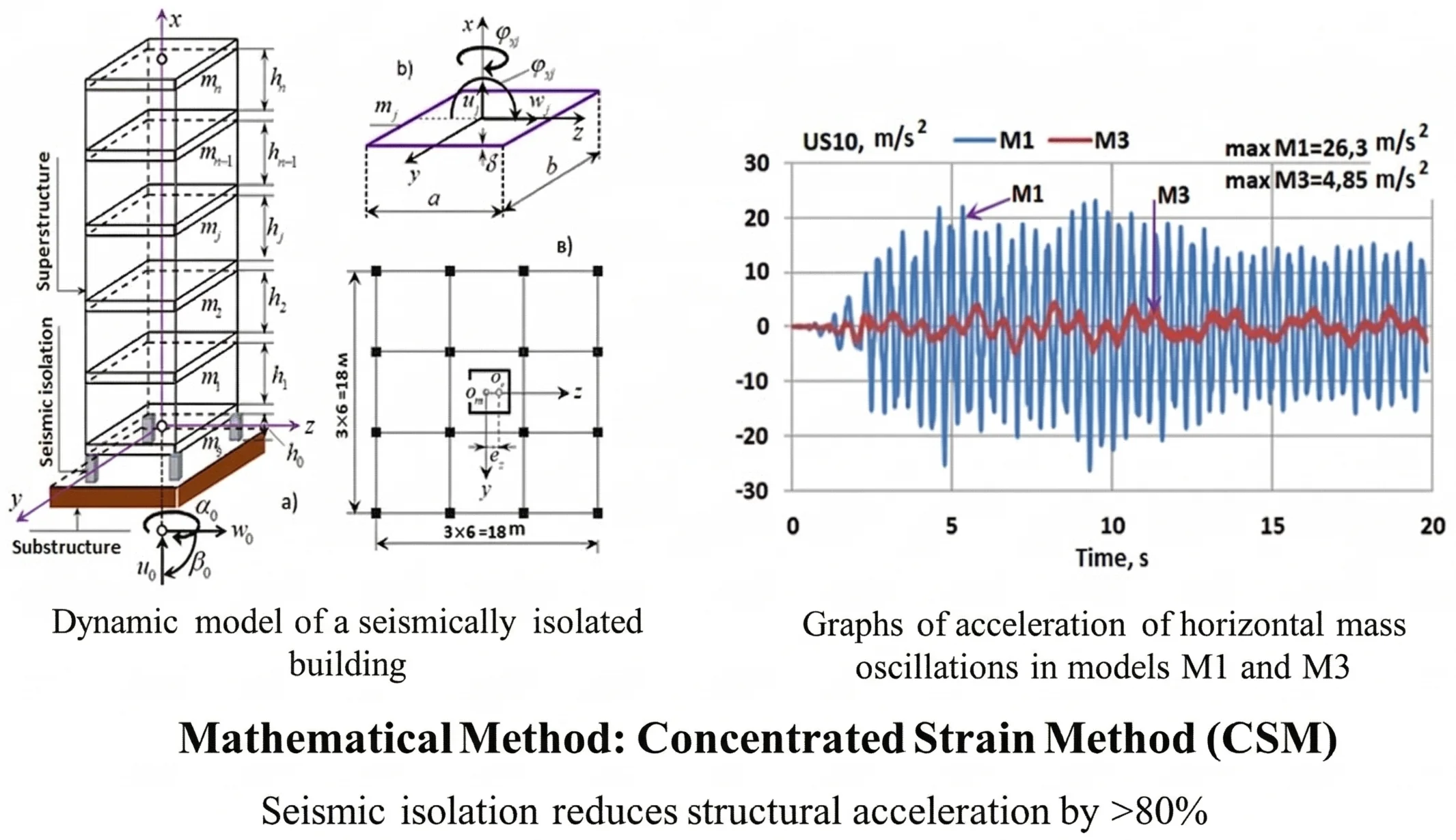
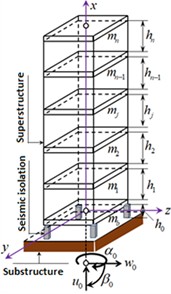
Let us consider a computational model of a seismically isolated building, in which the mass is concentrated at the floor levels in the form of an inertial mass with four degrees of freedom – two angular and two linear . It is assumed that the supporting part of the building experiences the action of a multi-component kinematic disturbance (Fig. 1(a)) , where , linear displacements; , angular displacements.
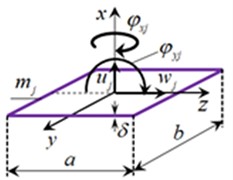
Fig. 1Dynamic model of a seismically isolated building
a)
b)
c)
From the consideration of dynamic equilibrium - inertial mass of the building, where between the centers of mass and rigidity there is eccentricity (Fig. 1(c)), based on the basic system of the displacement method, we obtain a system of equations that is represented in matrix form:
where , , , are the concentrated masses of the floor slab, columns, walls and stiffening core, respectively, at the -th level; the sum of the distributed masses of the columns, external wall panels, partitions and stiffening core; – the moment of inertia of the masses relative to the axis , passing through the center of gravity at the - th level; – the polar moment of the floor slab disk; , , , – the given linear and angular accelerations of the foundation soil; , , – the dimensions of the inertial mass (Fig. 1(b)).
System of differential equations of mass equilibrium foundation slab, obtained similarly to Eq. (1), is represented in matrix form:
where , – are the volumetric weight and thickness of the foundation slab; , – the diagonal matrices of the effective elastic stiffnesses and viscous damping; , – the displacement vectors of the inertial masses and respectively; , , , – the specified stiffness coefficients of the rubber-metal bearing; , , , – the stiffness coefficients corresponding to the first-floor elements; and the vector of restoring forces in the LRB. By writing Eq. (1) for all taking into account Eq. (2), we obtain a system of differential equations with a displacement vector of size .
One of the main tasks in solving dynamic problems of systems with a finite number of degrees of freedom is the formation of a stiffness matrix. Here, the method of concentrated strains (MCS) is used to construct the stiffness matrix. Formation of a stiffness matrix based on the method of concentrated strains [22]:
where is the external stiffness matrix [23]. After the external stiffness matrix has been formed according to the LRB we can begin to solve Eqs. (1) and (2), which are presented as a single system of equations:
where vector of external influence at the base of the building at the substructure level, vector of given dynamic loads. The numerical solution Eq. (4) leads to a system of algebraic equations, which is solved by the step method [3], [4].
2.2. Numerical modeling
For the purpose of numerical solution Eqs. (4), we approximate the sought function in time using the method of successive approximations [24] and the velocity and acceleration vectors corresponding to the moment in time , let’s represent it in the form:
where is the integration step over time, , – the approximation coefficients. By writing Eq. (4) at the moment in time and introducing Eq. (5) and (6) into this equation, we obtain:
The matrix Eq. (7) can be represented in standard form:
where , – the pseudo-acceleration and pseudo-velocity vectors. The damping matrix in Eqs. (9) and (10) can be represented using Rayleigh’s formula:
where , – are arbitrary proportionality coefficients. As noted in [35], when the damping matrix is proportional to the mass matrix, higher-order vibration modes will have very little damping, while when the damping is proportional to the stiffness matrix, higher-order vibration modes will be highly damped.
3. Results and discussion
Based on the described algorithm, the SI-MCD-El Centro computer program in FORTRAN was developed, and calculation results for a seismically isolated building with rubber-metal supports were obtained. For comparison purposes, calculation results for a model with rigid restraint and elastic supports were also obtained.
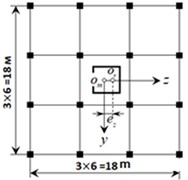
Example 1. Study of free vibrations. A dynamic model of a 9-story building with a frame structure and a rigid core is considered (Fig. 1(c)). The building, with plan dimensions of 18×18 m, a 6×6 m column grid, and a floor height of 3 m, rests on a 1 m thick foundation slab. The floor slabs are m thick 0.2 m. The modulus of elasticity of the material is 2×107 kN/m2, the shear modulus is 0.8×107 kN/m2, and the bulk density is 25 kN/m3. It is assumed that 20 rubber-metal bearings are installed in the supporting part of the building.
The block diagonal mass matrix of the building consists of 10 blocks each, which describes the components of the inertial masses of the corresponding level:
where the components of the diagonal block , corresponding to the foundation slab will be equal to 0.8257×102 ts2/m; 0.2229×104 tm∙s2; 0.4459×104 tm∙s2.
The remaining blocks of the matrix are presented in the form: , .
The rigidity characteristics of the reduced rod under tension and compression, bending, shear and torsion will be equal to 9.324×107 kN; 2.351×109 kN·m2; 3.108×107 kN; 1.877×109 kN.
The developed algorithm and computer program, based on the methods of concentrated deformations and successive approximations of the sought function over time, are implemented using the example of studying the free vibrations of a multi-story building with seismic isolation in the form of rubber-metal bearings. The results of the numerical solution are obtained for a building model with various boundary conditions: M1 – rigid clamping at the foundation; M2 – elastic supports; M3 – seismic isolation in the form of LRB. In model M2, it is assumed that the elastic supports reflect the flexibility of the foundation. The diagonal stiffness matrix is adopted in the following form [25] .
In the M3 model, elastic supports corresponding to the rigidity characteristics of rubber-metal supports are taken to be equal to: 20×0.275×104 kN /m; 2×109 kN/m; 2×107 kN·m; 2×106 kN. m.
Results were obtained for free oscillations from an instantaneous pulse distributed according to a triangular law. Fig. 2 compares the graphs of free oscillations for models M1 (curves 1 and 2) and M3 (curves 3 and 4) without and with damping, respectively.
Fig. 2Horizontal oscillations of the coating mass in models M1 and M3
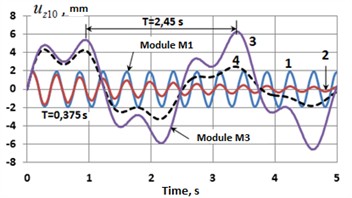
It can be seen that in the case of the seismic isolation model, the period and amplitude of free oscillations increase significantly. The periods of free oscillations for models M1 and M3 are 0.375 s and 2.45 s, respectively.
Example 2. Study of forced vibrations. A dynamic model of a building is considered, with initial data as in example 1, from the action of a vibration load , .
Results were obtained for various values of the vibration load oscillation period. Fig. 3 shows the graphs of horizontal oscillations of the mass of models M1 and M2, obtained from the action of a horizontal vibration load applied to the mass at 0.38; 0.42; 0.46 s. In model M1, a resonant mode is observed at 0.38 s, confirming the reliability of the results obtained with free oscillations, where the period is 0.375 s. A resonant mode is also observed in model M2 at 0.46 s, and at 0.42 s, we obtain oscillations close to resonant. The periods of resonant oscillations practically coincide with the periods of free oscillations of the studied models obtained from the action of an instantaneous pulse.
Fig. 4 shows the graphs of oscillations of a seismically isolated model for different values of the harmonic load period.
From these graphs it follows that when the value of the vibration load period is 2.42 s, which practically coincides with the period of free oscillations 2.45 s, an increase in the amplitude of oscillations is observed.
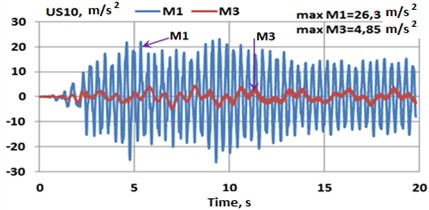
Example 3. Direct dynamic calculation for seismic effects. The developed algorithm was implemented on models M1, M2, and M3 with the same initial data as in Example 1. Results were obtained from a given accelerogram of the El Centro earthquake, with a sampling step of 0.02 s.
Graphs of mass acceleration changes in models M1 and M3, obtained from the action , are shown in Fig. 5. The comparison shows that the accelerations in the seismically isolated building are more than 5 times lower than in the building without seismic isolation.
Based on the conducted research, it can be concluded that the developed dynamic calculation method allows for studying the stress-strain state of a seismically isolated building under various impacts
Modeling based on method of concentrated deformations allows us to study the dynamic behavior of an object under multicomponent seismic impact.
Fig. 3Effects of harmonic load
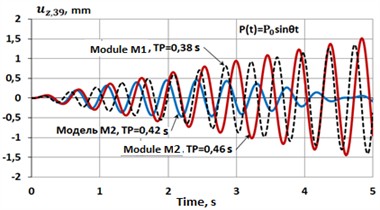
Fig. 4Oscillations of the M3 model at different harmonic load frequencies
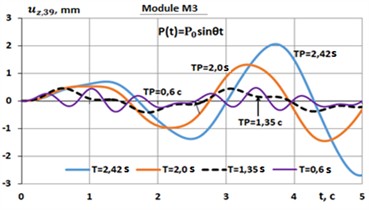
Fig. 5Graphs of acceleration of horizontal mass oscillations in models M1 and M3
In Table 1, the results of a comparative analysis obtained under various influences are presented, where the resonant modes are denoted by the letter R, which are obtained at the values of the vibrational load's operating period, coinciding with the free vibration period of the models.
It should be noted that the proposed algorithm, as follows from Eqs. (1) and (2), allows for the study of dynamic processes in seismically isolated buildings under four- or three-component seismic impacts in the form of given earthquake accelerograms. The proposed mathematical model can be improved to account for the nonlinear operation of seismic isolation, for example, based on the Bouc-Wen hysteresis model.
Table 1Numerical modeling results
Influence | Period, displacement, acceleration | Models | ||
М1 | М2 | М3 | ||
Instantaneous impulse | , s | 0.375 | 0.46 | 2.45 |
, mm | 1.89 | 2.67 | 6.52 | |
Vibrational load | , с | 0.38 | 0.46 | 2.42 |
, mm | R | R | R | |
Specified accelerogram | , m/s2 | 26.3 | – | 4.85 |
4. Conclusions
A dynamic computational model of a multi-story seismically isolated frame building is proposed, taking into account the longitudinal, translational, bending, and torsional movements of inertial masses using the concentrated strain method. The developed algorithm and computer programs for numerically solving dynamic problems enable the study of free and forced vibrations of buildings with seismic isolation under various impacts. The numerical modeling results obtained using the developed algorithms and computer programs confirm the effectiveness of seismic isolation rubber-metal bearings. It is shown that the use of seismic isolation leads to a significant reduction in acceleration and relative interstory shear, but at the same time, the absolute displacement of the building increases compared to a building without seismic isolation. The near coincidence of the frequencies obtained using the two methods confirms the reliability of the obtained results. The developed mathematical model and computer program can be used to study seismically isolated objects at the design variant stage.
References
-
Ya. M. Ayzenberg et al., “Effective seismic isolation systems. Research, design, construction,” Earthquake engineering, Safety of structures, No. 1, pp. 31–37, 2002.
-
L. Sh. Kilimnik, L. L. Soldatova, and L. I. Lyakhina, “Analysis of the performance of buildings with a sliding flange using a multi-mass calculation mode,” Structural Mechanics and Calculation of Structures, No. 6, pp. 69–73, 1986.
-
D. N. Nizomov, I. Kalandarbekov, and A. A. Khodzhiboev, “Numerical analysis of the model of a seismically isolated multi-story building,” Earthquake Engineering, Safety of Structures, No. 3, pp. 16–20, 2017.
-
D. N. Nizomov, I. K. Kalandarbekov, and I. I. Kalandarbekov, “Numerical modeling of seismically isolated buildings with dry friction,” DAN RT, Vol. 61, No. 1, pp. 47–53, 2018.
-
Y. D. Cherepinsky and M. N. Gusev, “Problems of seismic resistance of buildings using seismic isolating design solutions,” Earthquake Engineering, Safety of Structures, No. 5, pp. 53–55, 2006.
-
M. Higashino and S. Okamoto, Response Control and Seismic Isolation of Buildings. New York: Taylor & Francis, 2006.
-
I. Hirokazu and T. Taghikhany, “Optimum design of resilient sliding isolation system to protect equipments,” in 13th World Conference on Earthquake Engineering, 2004.
-
N. Kani, “Current State of Seismic – Isolation Design,” in 14th World Conference on Earthquake Engineering, 2008.
-
C. Raupov and G. Malikov, “Creep in expanded clay concrete at different levels of stress under compression and tension,” in E3S Web of Conferences, Vol. 365, p. 02008, Jan. 2023, https://doi.org/10.1051/e3sconf/202336502008
-
V. Tsoy, F. Karimova, N.M. Mukhammadiyev, and J. Turgayev, “Parameters of the oscillatory process of the sleeper base in the area of the rail joint when using elastic spacers,” in E3S Web of Conferences, Vol. 401, p. 05078, Jul. 2023, https://doi.org/10.1051/e3sconf/202340105078
-
N.M. Mukhammadiev and G. Malikov, “Use of basalt fiber in concrete mixture for manufacture of prefabricated concrete and reinforced concrete structures,” in 3rd International Symposium on Civil, Environmental, and Infrastructure Engineering (ISCEIE), Vol. 3317, p. 030043, Jan. 2025, https://doi.org/10.1063/5.0266812
-
A. Martelli and M. Forny, “Seismic isolation: present application and perspectives,” in International Workshop on Base Isolated High – Rise Buildings, pp. 1–26, 2006.
-
R. I. Skinner, W. H. Robinson, and G. H. Mc Verry, An Introduction to Seismic Isolation. New Zealand: John Wiley & Sons, 1993.
-
O. V. Mkrtychev and A. A. Bunov, Reliability of Reinforced Concrete Buildings with a Seismic Isolation System in the Form of Rubber-Metal Supports during an Earthquake. Moscow: ASV Publishing House, 2016.
-
J. M. Kelly, Earthquake-Resistant Design with Rubber. London: Springer London, 1997, https://doi.org/10.1007/978-1-4471-0971-6
-
V. P. Gupta and A. R. Chandrasekaran, “Absorber system for earthquake excitations,” in World Conference on Earthquake Engineering, 1969.
-
P. H. Wirsching and G. W. Campbell, “Minimal structural response under random excitation using the vibration absorber,” Earthquake Engineering and Structural Dynamics, Vol. 2, No. 4, pp. 303–312, Nov. 2006, https://doi.org/10.1002/eqe.4290020402
-
F. Naeim and J. M. Kelly, Design of Seismic Isolated Structures: From Theory to Practice. New York: John Wiley and Sons, 1999.
-
V. Zayas, S. S. Low, and S. A. Mahin, “The FPS earthquake resisting system, experimental report,” Report No. UCB/EERC-87/01, Earth Engineering Research Center, University of California, Berkeley, 1987.
-
V. I. Smirnov, “Testing of highly damping rubber-metal bearings for use in a seismically isolated building of a hotel and tourist complex Sea Plaza in Sochi,” Earthquake Engineering and Safety of Structures, No. 4, pp. 40–48, 2009.
-
“Anti-seismic devices,” BS EN 15129, European standard, 2018.
-
D. N. Nizomov and I. Kalandarbekov, Method of Concentrated Deformations in Solving Static and Dynamic Problems of Structural Mechanics. Du-shanbe: Irfon, 2005.
-
A. R. Rzhanitsyn, Structural Mechanics. Moscow: Vysshaya shkola, 1982.
-
D. N. Nizomov, Method of Boundary Equations in Solving Static and Dynamic Problems of Structural Mechanics. Moscow: ASV, 2000.
-
G. E. Shablinsky and D. A. Zubkov, Natural Dynamic Studies of Building Structures. Moscow: ASV Publishing House, 2009.
-
E. Shipacheva, R. Pirmatov, and D. Sharipova, “Exploration of heat transmission method in external enclosing structures of buildings under impact of solar radiation in the republic of Uzbekistan,” (in Russian), International Journal of Scientific and Technology Research, Vol. 8, No. 12, pp. 3415–3418, Dec. 2019.
-
V. Tsoy, D. Abdullaeva, and N.M. Mukhammadiyev, “Influence of silica-containing additives on structure formation of composite cement binder for non-autoclaved aerated concrete,” in Problems in the Textile and Light Industry in the Context of Integration of Science and Industry and Ways to Solve Them: PTLICISIWS-2, Vol. 3045, No. 1, p. 060019, Jan. 2024, https://doi.org/10.1063/5.0197488
-
I. Mukhamataliyev, N. Mukhammadiev, F. Ruzmetov, A. Khudoyorov, and S. Uzakov, “Performance properties of fiber-reinforced concrete particle-fiber-reinforced fox polfiber M12 BASF companies,” in 6th International Scientific Conference Construction Mechanics, Hydraulics and Water Resources Engineering, Vol. 3286, p. 020003, Jan. 2025, https://doi.org/10.1063/5.0281474
-
S. Erdem and K. Saifullah, “Soft-story effects on the behaviour of seismically isolated buildings under near and far-fault earthquakes,” Challenge Journal of Structural Mechanics, Vol. 2, No. 4, Jan. 2016, https://doi.org/10.20528/cjsmec.2016.12.038
-
A. Arifjanov, R. Pirmatov, U. Vakhidova, A. Khaydarov, S. Arifjanov, and K. Ruziyev, “Efficient use of reservoirs in Uzbekistan,” in BIO Web of Conferences, Vol. 141, p. 03022, Nov. 2024, https://doi.org/10.1051/bioconf/202414103022
-
A. Yanik and Y. Ulus, “Soil-structure interaction consideration for base isolated structures under earthquake excitation,” Buildings, Vol. 13, No. 4, p. 915, Mar. 2023, https://doi.org/10.3390/buildings13040915
-
V. Soy, “Investigation of effect of silica-containing additives on structure of composite binders,” in 3rd International Symposium on Civil, Environmental, and Infrastructure Engineering (ISCEIE), Vol. 3317, p. 030039, Jan. 2025, https://doi.org/10.1063/5.0267635
-
C. Raupov and G. Malikov, “Comparison of microcrack formation boundaries determined by complex of physical methods with long-term strength of expanded clay concrete under different types of stress state,” in E3S Web of Conferences, Vol. 365, p. 02023, Jan. 2023, https://doi.org/10.1051/e3sconf/202336502023
-
S. Kitayama and H. Cilsalar, “Seismic loss assessment of seismically isolated buildings designed by the procedures of ASCE/SEI 7-16,” Bulletin of Earthquake Engineering, Vol. 20, No. 2, pp. 1143–1168, Nov. 2021, https://doi.org/10.1007/s10518-021-01274-y
-
R. Clough and J. Penzien, Dynamics of Structures. Moscow: Stroyizdat, 1979.
About this article

The authors have not disclosed any funding.
The datasets generated during and/or analyzed during the current study are available from the corresponding author on reasonable request.
The authors declare that they have no conflict of interest.
