Abstract
A no spill-over method is developed which uses measured normal modes and natural frequencies to adjust a structural dynamics model in light of displacement feedback technique. By the method, the required displacement feedback gain matrix is determined, and thus the updated stiffness matrix which satisfies the characteristic equation is found in the Frobenius norm sense and the large number of unmeasured high-order modal data of the original model is preserved. The method directly identifies, without iteration, and the solution of this problem is of a compact expression. The numerical example shows that the modal measured data are better incorporated into the updated model.
1. Introduction
After spatial discretization by using the finite element method, the equation of motion of a linear elastic time-invariant structure with degrees of freedom is given by:
In which , analytical mass matrix, is symmetric positive definite and , analytical stiffness matrix, is symmetric positive semidefinite. is the displacement vector and is the external force vector. Eq. (1) is known as the finite element (FE) analytical model of the structure. Let be a soluton of the homogeneous part of Eq. (1), then we can get the following eigenvalue-eigenvector equation:
where . Let:
where:
Then Eq. (2) can be equivalently written as:
Assume that the modal orthogonality relationship is satisfied:
By substituting Eq. (4) into Eq. (3), we can get another orthogonality relation:
When active control forces are exerted on an undamped vibration system, Eq. (1) now becomes:
where is the full column rank control feedback matrix and is the control vector. In discussing the feedback control, we assume that the control vector is defined by the control law:
where is displacement feedback gain matrix. By substituting Eq. (7) into Eq. (6) yields the following closed-loop system:
Separation of variables by which leads to the generalized eigenvalue problems of Eq. (8) as follows:
where .
In engineering practice, accurate mathematical models are required in order to predict their dynamic characteristics accurately. However, current FE analysis cannot provide sufficiently accurate FE models, which are in good agreement with measured results. A vibration engineer then faces the problem of updating the existing FE model with minimal changes so that the updated FE model can better reflect the measured data from the physical structure being modelled [1]. The updated model may then be considered a better predictions of the responses of the structure, and can be used with greater confidence for damage detection, health monitoring and structural control, and so on.
Model updating techniques are now extensively developed and studied for the structural systems. For undamped systems, to update coefficient matrices using vibration test data by means of direct matrix-updating methods has been considered by Thoren [2], Baruch and Bar-Itzhack [3], Berman and Nagy [4], Wei [5], Modak et al. [6], Yang and Chen [7], Yuan [8], Yuen [9], Yuan and Liu [10], Modak [11] and Sarmadi et al. [12]. For damped structural systems, the theory and methods have been discussed by Friswell et al. [13], Kuo et al. [14], Bai [15], Lancaster [16], Yuan and Dai [17], Yuan and Liu [18] and Mao and Dai [19]. Carvalho et al. [20] presented a numerical method for the stiffness matrix updating problem in an undamped model. by the IMDH (incomplete measured data handling) method, they overcame the difficulty of the incomplete measured data in an algorithmic way without using standard modal expansion or reduction techniques. The method is also capable of preserving the large number of eigendata of the FE model that are not affected by updating. Very more recently, Sehgal and Kumar [21] presented a review of structural dynamic model updating techniques. A number of direct and iterative techniques of model updating along with their applications to real life systems are reviewed and a number of future research directions have been highlighted which can be used for further advancements in the field of model updating.
It is of practical importance for updating an existent model that the newly measured parameters enter the system without altering other unrelated high-order vibration parameters. Such an updating is known as no spill-over. Assume that , are known for the first eigenvalues and associated eigenvectors of the original system. The remaining unknown eigenpairs and remain unchanged. Some explanations for updating with no spill-over being required see the Ref. [32].
The aim of this paper is to modify the stiffness matrix by using the displacement feedback so that the modified second-order system Eq. (8) will contain a number of measured eigenvalues and eigenvectors. Mathematically, the problem of updating stiffness matrix with no spill-over by displacement feedback, therefore, can be stated as follows.
Problem 1. Let be a full column rank matrix. Assume that and are respectively the measured eigenvalue and eigenvector matrices, where Find displacement feedback gain matrix such that:
where and . Generally, the solution of Problem 1 is not unique. Thus, we need to solve the following least-squares approximation problem.
Problem 2. Find such that:
where is the solution set of Problem 1. Once the solution of Problem 2 is obtained, the updated stiffness matrix can be expressed as:
Many structural components are generally subjected to dynamic loadings in their working life. Very often these components may have to perform in severe dynamic environment where in the maximum damage results from the resonant vibration [22]. Therefore, in order to avoid the undesired phenomena, one way is to use feedback control so that the unfavorable eigendata are replaced by some suitable ones [23-26]. The idea of using the eigenstructure assignment technique to solve the model updating problem has been considered by [27, 28]. The method can produce an updated FE model on damping and stiffness matrices that matches the measured modal data. More recently, Ouyang and Zhang [29] addressed passive structural modifications of mass-spring systems for partial assignment of natural frequencies, two solution methods were proposed to construct the required mass-normalised stiffness matrix, which satisfies the partial assignment requirement of natural frequencies and maintains the configuration of the original structure after modifications. Sen and Bhattacharya [30] adopted a control theory-based eigenstructure assignment technique to update the FE model of a linear time-invariant system. The proposed method uses state feedback to produce the gain matrix which in turn updates the existing system matrices through simultaneous assignment of eigenvalue and eigenvector pairs in the FE model generated system matrices. Richiedei and Trevisani [31] introduced a novel hybrid method for vibration control in lightly damped systems through the concurrent synthesis of passive structural modifications and active state feedback control gains. The passive modifications alter the set of eigenvectors that can be achieved through state feedback control and gives additional degrees of freedom in the controller synthesis, which overcoming the limitations of eigenstructure assignment through active control used alone.
It should be mentioned that the studies by Zhang et al. [33-35], Chu and Datta [23], Nichols and Kautsky [24], Datta et al. [25] and Lin and Wang [26] lead to a feedback design problem for a second-order control system. That consideration eventually results in either a full or a partial eigenstructure assignment for the eigenvalue problem. Nonetheless, these results cannot meet the basic requirement that the updated matrices should be symmetric. Our main contribution is to provide a new numerical method to solve the FE model updating problem using displacement feedback technique and the updated model has the following properties:
• The measured eigenvalues and eigenvectors will be embedded in the updated model.
• The updated stiffness matrix is also symmetric and positive semidefinite.
• The eigenvalues and eigenvectors corresponding to the unmeasured ones remain unchanged.
• The difference between the updated model and the original model is minimal.
The method directly identifies, without iteration, and works directly on the second-order system model. More importantly, the approach allows the control matrix to be specified beforehand and also leads naturally to a small norm solution of the feedback gain matrices. We believe that the method proposed should give considerable insight into the important model updating problem.
In what follows, in Section 2, by using the QR-decomposition and the singular value decomposition (SVD) of matrices, we provide a necessary and sufficient condition for the set to be nonempty and construct the set explicitly when it’s nonempty. In Section 3, when the set is nonempty, we show that the solution of Problem 2 is unique and present the explicit expression of the unique solution of this problem. In Section 4, a numerical algorithm is proposed to determine the displacement feedback gain matrix and a numerical example is provided to demonstrate the effectiveness of the proposed method.
As usual, let be the set of all real matrices and the set of all symmetric matrices in . and denote the transpose, the Moore-Penrose generalized inverse and the Frobenius norm of the matrix , respectively. denotes the identity matrix of order .
2. The solution of Problem 1
In order to solve Problem 1, the following two lemmas are needed.
Lemma 1. If , , then has a solution if and only if In which case, the general solution of can be expressed as , where is an arbitrary matrix [36].
Lemma 2. Suppose that , , then the matrix equation has a symmetric solution if and only if [37]:
in which case, the general symmetric solution is:
where is an arbitrary symmetric matrix.
Let:
Assume that the QR-decomposition of is:
where is an orthogonal matrix () and is an nonsingular matrix. By Lemma 1 and Eq. (15), Eq. (14) with respect to is solvable if and only if:
and thus the unique solution can be represented as:
By Lemma 2, Eq. (16) always has a symmetric solution and the general symmetric solution is:
where is an arbitrary symmetric matrix. Substituting Eq. (18) into Eq. (17), we obtain:
By Eqs. (4) and (5), we get:
Using Eq. (20) and noting that is of full column rank, Eq. (10) is equivalent to:
where , In practice, the matrices and in Eq. (10) are usually unknown, we notice that the matrices and don’t appear in Eq. (21) explicitly. It follows from Eq. (21) that:
Observe that:
That is, Eq. (10) is equivalent to:
Substituting Eq. (18) into Eq. (22), we obtain:
which implies that:
Assume that the singular value decomposition (SVD) of is:
where , , and are orthogonal matrices, ,
Using Lemma 2 again, the general symmetric solution of Eq. (23) is:
where is an arbitrary symmetric matrix. By substituting Eq. (25) into Eq. (18), we obtain the general symmetric solution of Eqs. (10) and (14) as:
where is an arbitrary symmetric matrix.
Now, to solve Problem 1 is equivalent to finding symmetric matrix such that:
where Observe that if let then and be an othogonal matrix. Thus, the equation of Eq. (27) can be equivalently written as:
Let the SVD of be:
where:
are orthogonal matrices, , By Lemma 2, Eq. (29) has a symmetric solution if and only if:
In which case, the general symmetric solution is:
where and is an arbitrary symmetric matrix.
As a summary, we can get the following result.
Theorem 1. Let the QR-decomposition of be given by Eq. (15) and the SVD of the matrix be given by Eq. (24). Assume that and the SVD of the matrix is given by Eq. (30). If the conditions (28) and (31) hold, then Problem 1 is solvable and the solution set of Problem 1 can be expressed as:
where and is given by Eq. (32) and is an arbitrary symmetric matrix.
3. The solution of Problem 2
It has been shown in Section 2 that if the conditions (28) and (31) are satisfied, the solution set is nonempty. Clearly, is a closed convex subset of . It follows from the best approximation theorem [38] that there exists a unique solution in such that Eq. (12) holds. Now, we will seek the unique solution in . For , we can get:
where Thus, by Eq. (32) we can obtain:
where:
Therefore, if and only if:
By substituting Eq. (34) into Eqs. (19) and (32), we obtain the following result.
Theorem 2. If the conditions (28) and (31) hold, then Problem 2 has a unique solution and it can be described as:
where:
and is given by Eq. (33).
4. A numerical example
Based on Theorems 1 and 2 we can establish an algorithm for solving Problems 1 and 2 as follows.
Algorithm.
1) Input , , , , , ,
2) Compute the QR-decomposition of by Eq. (15).
3) Compute and the SVD of the matrix by Eq. (24).
4) Compute and and the SVD of the matrix by Eq. (30).
5) Compute
6) If the conditions (28) and (31) hold, then continue, otherwise, go to 1).
7) Compute and by Eqs. (33) and (36), respectively.
8) Compute by Eq. (35).
9) Compute by Eq. (13).
Example. Consider a cantilever beam model (see, Fig. 1). The cross section of the beam is rectangular with length 2 m, width 60 mm and height 3 mm, respectively. The material of the cantilever beam is aluminum alloy with the modulus of elasticity = 71 GPa, Poisson ratio = 0.33 and mass density = 2.714×10-5 N/mm3 The beam is discretised into 10 elements shown in Fig. 1.
Fig. 1The model of a cantilever beam
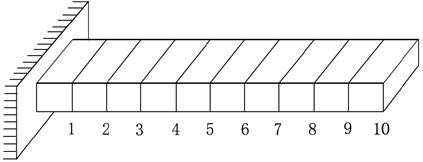
The mass matrix of the FE model is diagonal and the stiffness matrix is 3-diagonal, which are given by:
and are given by:
The measured modal data are given by:
Let control feedback matrix be:
It is easy to check that the conditions (28) and (31) hold:
By the Algorithm, we can obtain the following unique solution of Problem 2:
In which case, the optimal updated stiffness matrix can be figured out.
Fig. 2 indicates the absolute values of the stiffness discrepancy matrix obtained from the proposed model updating method. We define the residual as:
and the numerical results are shown in the Tables 1 and 2.
Fig. 2The absolute values of the stiffness discrepancy matrix (SDM) using the proposed method
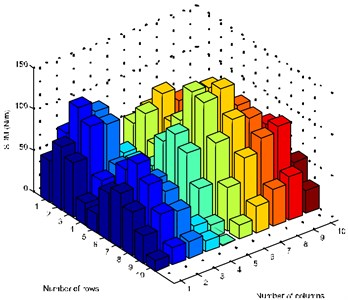
Fig. 3The frequencies of the measured and updated models
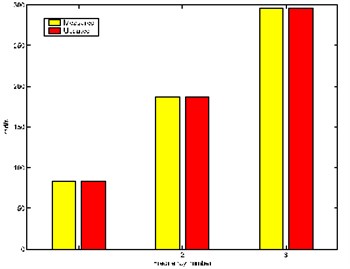
Fig. 4The frequencies of the analytical and updated models
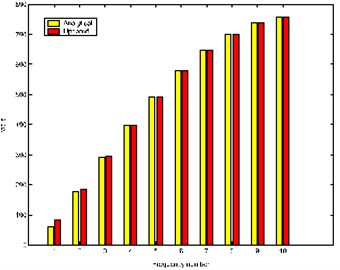
Table 1 shows that the measured modal data are embedded in the new model (Fig. 3 shows the comparison of frequencies of the measured model with the updated model) and Table 2 implies that the model is updated with no spill-over (Fig. 4 shows the comparison of frequencies of the analysis model with the updated model) and the updated stiffness matrix is also symmetric and positive definite.
Table 1Numerical results
Eigenpairs | |
1.6404e-011 | |
3.0154e-011 | |
2.2863e-011 |
Table 2Numerical results
Eigenpairs | |
7.0668e-011 | |
6.7161e-011 | |
3.3355e-011 | |
2.1904e-011 | |
2.7824e-011 | |
5.457e-011 | |
6.671e-011 |
5. Conclusions
A no spill-over direct updating method for undamped vibration systems with vibration test data using displacement feedback technique has been presented. When the conditions (28) and (31) hold, the required displacement feedback gain matrix can be determined, and the optimal updated stiffness matrix which satisfies the characteristic equation can be achieved. The method is easy to implement, and allows the control matrix to be specified beforehand. Although the proposed method can guarantee that the updated matrix is symmetric and positive semidefinite, it failed to preserve the pattern of the FE stiffness matrix. How to maintain the physical connectivity of the updated matrix is worthy of further study.
References
-
Friswell M. I., Mottershead J. E. Finite Element Model Updating in Structural Dynamics. Klumer Academic Publishers, Dordrecht, 1995.
-
Thoren A. R. Derivation of mass and stiffness matrices from dynamic test data. AIAA Conference Paper, No. 72-346, 1972, 6 pages.
-
Baruch M., Bar Itzhack I.-Y. Optimal weighted orthogonalization of measured modes. AIAA Journal, Vol. 16, 1978, p. 346-351.
-
Berman A., Nagy E. J. Improvement of a large analytical model using test data. AIAA Journal, Vol. 21, 1983, p. 1168-1173.
-
Wei F. S. Mass and stiffness interaction effects in analytical model modification. AIAA Journal, Vol. 28, 1990, p. 1686-1688.
-
Modak S. V., Kundra T. K., Nakra B. C. Model updating using constrained optimization. Mechanics Research Communications, Vol. 5, 2002, p. 543-551.
-
Yang Y. B., Chen Y. J. A new direct method for updating structural models based on measured modal data. Engineering Structures, Vol. 31, 2009, p. 32-42.
-
Yuan Y. A symmetric inverse eigenvalue problem in structural dynamic model updating. Applied Mathematics and Computation, Vol. 213, 2009, p. 516-521.
-
Yuen K.-V. Updating large models for mechanical systems using incomplete modal measurement. Mechanical Systems and Signal Processing, Vol. 28, 2012, p. 297-308.
-
Yuan Y., Liu H. An iterative updating method for undamped structural systems. Meccanica, Vol. 47, 2012, p. 699-706.
-
Modak S. V. Direct matrix updating of vibroacoustic finite element models using modal test data. AIAA Journal, Vol. 52, 2014, p. 1386-1392.
-
Sarmadi H., Karamodin A., Entezami A. A new iterative model updating technique based on least squares minimal residual method using measured modal data. Applied Mathematical Modelling, Vol. 40, 2016, p. 10323-10341.
-
Friswell M. I., Inman D. J., Pilkey D. F. The direct updating of damping and stiffness matrices. AIAA Journal, Vol. 36, 1998, p. 491-493.
-
Kuo Y.-C., Lin W.-W., Xu S.-F. New methods for finite element model updating problems. AIAA Journal, Vol. 44, 2006, p. 1310-1316.
-
Bai Z. J. Constructing the physical parameters of a damped vibrating system from eigendata. Linear Algebra and its Applications, Vol. 428, 2008, p. 625-656.
-
Lancaster P. Inverse spectral problems for semisimple damped vibrating systems. SIAM Journal on Matrix Analysis and Applications, Vol. 29, 2007, p. 279-301.
-
Yuan Y., Dai H. On a class of inverse quadratic eigenvalue problem. Journal of Computational and Applied Mathematics, Vol. 235, 2011, p. 2662-2669.
-
Yuan Y., Liu H. A gradient based iterative algorithm for solving structural dynamics model updating problems. Meccanica, Vol. 48, 2013, p. 2245-2253.
-
Mao X., Dai H. A quadratic inverse eigenvalue problem in damped structural model updating. Applied Mathematical Modelling, Vol. 40, 2016, p. 6412-6423.
-
Carvalho J., Datta B. N., Gupta A., Lagadapati M. A direct method for model updating with incomplete measured data and without spurious modes. Mechanical Systems and Signal Processing, Vol. 21, 2007, p. 2715-2731.
-
Sehgal S., Kumar H. Structural dynamic model updating techniques: a state of the art review. Archives of Computational Methods in Engineering, Vol. 23, 2016, p. 515-533.
-
Korabathina R., Koppanati M. S. Linear free vibration analysis of rectangular Mindlin plates using coupled displacement field method. Mathematical Models in Engineering, Vol. 2, 2016, p. 41-47.
-
Chu E. K.-W., Datta B. N. Numerically robust pole assignment for second-order systems. International Journal of Control, Vol. 64, 1996, p. 1113-1127.
-
Nichols N. K., Kautsky J. Robust eigenstructure assignment in quadratic matrix polynomials: Nonsingular case. SIAM Journal on Matrix Analysis and Applications, Vol. 23, 2001, p. 77-102.
-
Datta B. N., Elhay S., Ram Y. M., Sarkissian D. R. Partial eigenstructure assignment for the quadratic pencil. Journal of Sound and Vibration, Vol. 230, 2000, p. 101-110.
-
Lin W.-W., Wang J.-N. Partial pole assignment for the quadratic pencil by output feedback control with feedback designs. Numerical Linear Algebra with Applications, Vol. 12, 2005, p. 967-979.
-
Zimmerman D., Widengren M. Correcting finite element models using a symmetric eigenstructure assignment technique. AIAA Journal, Vol. 28, 1990, p. 1670-1676.
-
Minas C., Inman D. J. Correcting finite element models with measured modal results using eigenstructure assignment methods. Proceedings of the 4th IMAC Conference, Schenectady, NY, 1987, p. 583-587.
-
Ouyang H., Zhang J. Passive modifications for partial assignment of natural frequencies of mass-spring systems. Mechanical Systems and Signal Processing, Vol. 50, Issue 51, 2015, p. 214-226.
-
Sen S., Bhattacharya B. Non-iterative eigenstructure assignment technique for finite element model updating. Journal of Civil Structural Health Monitoring, Vol. 5, 2015, p. 365-375.
-
Richiedei D., Trevisani A. Simultaneous active and passive control for eigenstructure assignment in lightly damped systems. Mechanical Systems and Signal Processing, Vol. 85, 2017, p. 556-566.
-
Chu M. T., Datta B. N., Lin W. W., Xu S. F. Spillover phenomenon in quadratic model updating. AIAA Journal, Vol. 46, 2008, p. 420-428.
-
Zhang J., Ouyang H., Yang J. Partial eigenstructure assignment for undamped vibration systems using acceleration and displacement feedback. Journal of Sound and Vibration, Vol. 333, 2014, p. 1-12.
-
Zhang J., Ye J., Ouyang H. Static output feedback for partial eigenstructure assignment of undamped vibration systems. Mechanical Systems and Signal Processing, Vol. 68-69, 2016, p. 555-561.
-
Zhang J., Yuan Y., Liu H. An approach to partial quadratic eigenvalue assignment of damped vibration systems using static output feedback. International Journal of Structural Stability and Dynamics, https://doi.org/10.1142/S0219455418500128.
-
Ben Israel A., Greville T. N. E. Generalized Inverses. Theory and Applications. Second Ed., Springer, New York, 2003.
-
Don F. J. H. On the symmetric solutions of a linear matrix equation. Linear Algebra and its Applications, Vol. 93, 1987, p. 1-7.
-
Aubin J. P. Applied Functional Analysis. John Wiley & Sons, New York, 1979.
About this article

