Abstract
In this paper, a novel idea of organizing the search for similar fragments in vibro-acoustic signals (and not only) is proposed. The key point of this proposal is the task-oriented use of the signal smoothness parameter values (smoothness estimates). Firstly, the notion of smoothness of the signal is introduced; secondly, an iterative procedure for finding the signal smoothness estimates is presented; finally, some important properties of the signal smoothness estimates are formulated and proved. A special attention is paid to the necessary signal similarity condition; it is proved that small fragmentary changes in the vibro-acoustic signal lead to small changes in the signal smoothness parameter value. Preliminary experimental analysis results showed that the use of the necessary signal similarity condition might be of service in gear fault diagnosis, in fractal forecasting of real acoustical time series, in speeding-up some computational processes associated with interpolation of vibro-acoustic signals, data mining, etc.
1. Introduction
The constantly growing interest in the condition monitoring, i.e. in the data extracted from vibro-acoustic signature of a machinery (vibration, temperature, electrocardiography, etc.) [1], has encouraged a new outlook towards the information stored in databases. The storage of raw data is of little value and so there can be seen a strong need to develop methods allowing to index, classify and process extensive data flows coming from various fields.
Preliminary processing of all types of data is the first step to making data analysis easier, therefore the increased attention to queries related to real vibro-acoustic signals and to the organization of data mining, not surprisingly, has good reasons. Besides, data mining is a very broad field; quite a few methods, algorithms and applied systems have been developed for this reason [2, 3].
In the data acquisition area, one encounters problems of interpolation, forecasting, feature extraction, early fault diagnosis, exposing fractal nature and others, which are usually associated with fragmentary analysis of vibro-acoustic (and not only) signals. Fragmentary analysis of signals usually employs the brute force procedures which are heavily time-consuming. One of the possible ways to avoid this difficulty is to solve the so-called signal similarity problem by introducing various metrics [4, 5]. The solution leans upon the use of the necessary signal similarity condition [6-8]. Then fragmentary analysis of vibro-acoustic signals is replaced by comparing fragmentary smoothness parameter values attached to signal fragments under investigation. The appreciable speed gains are achieved, and the door for the real-time preliminary signal processing is opened.
This paper introduces the context where the problem on the detection of similar fragments in the vibro-acoustic signals is formulated and solved.
2. The notion of fragmentary smoothness of vibro-acoustic signals
Let us take a one-dimensional data array corresponding to the vibro-acoustic signal fragment We shall introduce the concept of fragmentary smoothness of the vibro-acoustic signal while analysing the discrete spectrum of the data array , i.e. by transferring into the spectral domain by means of a particular discrete transform.
In general, any discrete transform (DT) of the data array is defined by the equality:
for all here is the discrete spectrum of and stands for the system of discretized orthogonal functions (basis DT vectors).
While analysing fragmentary smoothness of vibro-acoustic signals, we are to use the discrete cosine transform (DCT). This transform is characterized by very good energy compaction potential at lower frequencies [9].
Mathematically, the DCT, when applied to the data array , is defined as follows:
for all . Hereby, the discrete DCT spectrum of is .
Inverse discrete cosine transform (IDCT) is defined by the equality:
for all .
The energy compaction property related to the aforesaid transform means that the spectral DCT coefficients decrease in absolute value, as their serial numbers increase. Evidently, there exist real numbers, and , such that the curve approximates, in the mean squared error sense, an ordered array of spectral coefficients , i.e.:
The parameter , characterizing the shape of the approximating curve , is considered to be the fragmentary smoothness parameter (in what follows, simply, smoothness parameter) of the vibro-acoustic signal fragment [10].
3. The evaluation of smoothness estimates of vibro-acoustic signals
The smoothness parameter and the constant define the shape of the curve which approximates the spectral DCT coefficients (Section 2). To find numerical values of and , the least squares method is explored. Let:
be an objective function.
In order to find the expression for the parameter , we are in difficulties, because neither the array of spectral coefficients nor the approximating curve are linear.
On the other hand, the application of the method of least squares to the objective function enables us to derive the functional relationship between parameters and , namely:
Thus, we are going to apply the data “linearization” procedure (logarithmization). Firstly, an array of spectral DCT coefficients is modified by excluding all zero spectral coefficients, i.e. indices of the remaining coefficients are taken from the set . After “linearization”, the objective function is fixed anew, i.e.:
where .
Now, applying the method of least squares, we immediately obtain:
It is obvious that is the very first approximation (the 0-th estimate) of the smoothness parameter of the vibro-acoustic signal fragment (data array) , found after having excluded all zero coefficients from the array of DCT coefficients; here stands for the number of elements in .
In order to get the more exact estimates of the smoothness parameter , an iterative procedure has been developed, namely:
1. , , .
2. Compute:
3. If for all k, then , and go to step 7.
4. Compute:
5. If then is the step size; initially, ), and go to step 4.
6. If , then , , and go to step 4.
7. The end. The estimate of the fragmentary smoothness parameter is obtained, i.e. .
Some practically important properties of the smoothness parameter and its estimates are proved and presented below.
4. The main properties of the signal smoothness parameter
Let us consider a vibro-acoustic signal fragment , whose smoothness parameter value is . Let be the discrete DT spectrum of . We here are to show that the smoothness parameter is invariant with respect to both the inversion of the fragment and the multiplication of by a scalar.
The inversion of the signal fragment is understood to be an action leading to a new signal fragment , namely: , where , for all .
Now, suppose that denotes the DT spectrum of , i.e.:
where From the expression above, one can see that if and only if , for all . Since the aforesaid equalities are fulfilled for DCT, we conclude that , as well as (0, 1,...), is invariant with respect to the inversion of the signal fragment .
The multiplication of the signal fragment by the scalar is a new signal fragment , with , for all . The spectral DT coefficients of have expressions:
for all . Let us show that, when passing from to and applying the earlier described iterative procedure (Section 3), the smoothness parameter and its estimates (0, 1,...) are left unchanged.
First of all, let us note that the 0-th approximation of (Eq. (9)) does not depend on . Really:
Finally, from the Eqs. (10) and (11) it directly follows that and , for all 0, 1,…. Since and take on minima for the same value of , we come to the conclusion that , i.e. the smoothness estimates (0, 1,...) are invariant with respect to the multiplication of the vibro-acoustic signal fragment by .
Worth emphasizing that the above invariance property is also valid in the case of the discrete Walsh-Hadamard transform, the discrete Hartley transform, etc. [11], whereas in the case of the discrete Fourier transform or any of the discrete wavelet transforms, the invariance property no longer holds.
5. The necessary signal similarity condition
Suppose that two data arrays and (, ) represent two arbitrary fragments of the same real vibro-acoustic signal. Also, let the DT spectra of and be denoted by and respectively. Suppose, signifies the smoothness parameter of and signifies that of .
Let , for all . We shall prove that small fragmentary changes () lead to small changes in . Indeed, with any , the following inequality holds true:
here and signifies the mean squared error between and .
Now, from Eq. (9) (Section 3), it directly follows that:
where:
Since, for all :
provided , we obtain:
here .
Thus, small changes in lead to small changes in the smoothness parameter value , namely:
This is the necessary signal similarity condition, because the inequality implies , i.e. the signal fragments and cannot be similar, in the mean squared error sense, if their smoothness parameter values differ significantly. Besides, the relationship may be established experimentally.
6. Experimental analysis results
First and foremost, let us observe that, in applying diversified (for instance, fractal) iterative signal interpolation techniques, iterative signal forecasting procedures or, simply, schemes oriented to detect self-similarities in vibro-acoustic (and not only) signals, one and the same approach is explored, i.e. the signal under processing is divided into a finite number of non-overlapping signal blocks (range fragments) of equal size, and then, for each range fragment, the best matched signal block (domain fragment) of double, triple or fourfold size, in comparison with that of the range fragment, is found [12, 13].
Fig. 1Vibration signals of size 1024, under some typical rolling bearing conditions
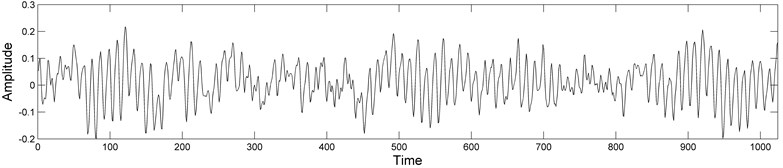
a) Normal condition
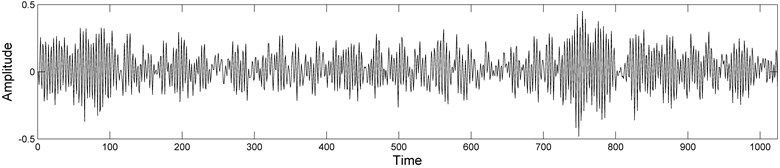
b) Ball fault condition
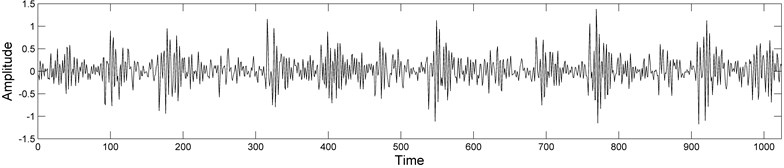
c) Inner race fault condition
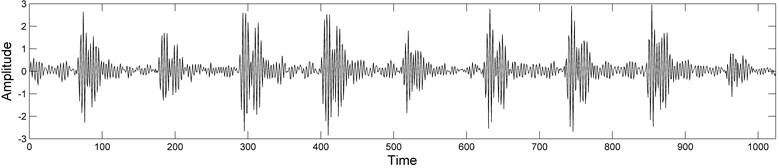
d) Outer race fault condition
In what follows, we are to show that the use of the necessary signal similarity condition (Section 5) in the search process for the best (in the mean squared error sense) pairings “range fragment domain fragment ” reduces the computational complexity, in comparison with the brute force approach, considerably. On the other hand, we are to demonstrate that employment of the above condition is especially important in the condition monitoring (early gear fault diagnosis).
To corroborate the proposed theoretical ideas, a few vibration signals of size 1024, corresponding to rolling bearing under normal, ball fault, inner race fault and outer race fault conditions (Fig. 1), have been analysed. The test bearing data, i.e. fault diameters (0.1778 mm), frequency (12000 Hz), shaft rotating speed of the motor (1797 rpm) and the signals themselves were obtained from the Bearing Data Center of Case Western Reserve University [14].
First of all, the vibration signal of rolling bearing under normal conditions (Fig. 1(a)) was processed. The 48th range fragment of size 16, the 23rd range fragment of size 32 and the 12th range fragment of size 64 were compared with all possible domain fragments of double, triple and fourfold size, respectively. Some experimental analysis results, for the case (), are presented in Fig. 2. As it can be seen, practically in all cases, the best pairings correspond to small values of For instance, the best pairing for the range fragment ( was fixed with , where . In this case, the number of potential domain fragments decreases from 993 (brute force approach) to 215. Analogously, the best pairing for the range fragment was found with (Fig. 2(b)). In this case, the number of potential domain fragments decreases from 961 to 59. Also, in Fig. 2(c), the best pairing for ; was fixed with and the number of potential domain fragments decreases from 897 to 11.
Fig. 2Search for best pairings “U↔V” (normal condition): a) range fragment U of size 16 (|V|= 32), b) range fragment U of size 32 (|V|= 64), c) range fragment U of size 64 (|V|= 128)

a)
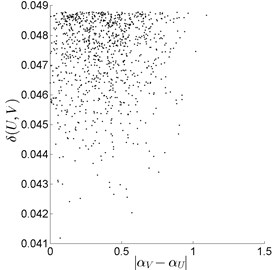
b)
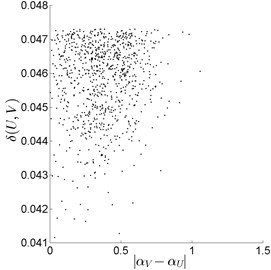
c)
Fig. 3Search for best pairings “U↔V” (normal condition vs fault condition), with the 48th range fragment U of size 16 (|V|= 32)
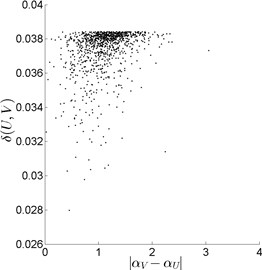
a) Normal vs Ball fault

b) Normal vs Inner race fault
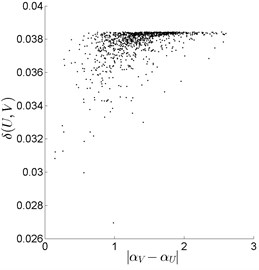
c) Normal vs Outer race fault
Secondly, the vibration signal of rolling bearing under normal condition (Fig. 1(a)) was compared with vibration signals under fault conditions (Fig. 1(b)-(d)). The same, as before, range fragments of size 16, 32 and 64 were compared with all possible domain fragments of double, triple and fourfold size, respectively. Some typical comparison results ) are presented in Fig. 3.
To expose differences between the two groups of searching results, “normal vs normal” (Fig. 2) and “normal vs fault” (Fig. 3), the averaged grouping (“pool”) centres , )) were found, namely (0.281, 0.033), under normal condition (Fig. 1(a)); (1.103, 0.037), under ball fault condition (Fig. 3(a)); (1.146, 0.037), under inner race fault condition (Fig. 3(b)); (1.332, 0.038), under outer race fault condition (Fig. 3(c)). As it can be seen, in the “normal vs fault” case, the “pool” centres are strongly biased to the right, in comparison with “normal vs normal” case, (Fig. 4(a)). Similar situation is observed for () and () (Fig. 4(b), Fig. 4(c)).
Based on the above considerations, we here conclude that the observable considerable displacements of “pool” centres (Fig. 4) may serve the purpose of being excellent quality criteria in the condition monitoring (gear fault diagnosis) area.
Fig. 4Location and displacement of “pool” centres: a) |U|= 16, |V|= 32, b) |U|= 32, |V|= 64, c) |U|= 64, |V|= 128
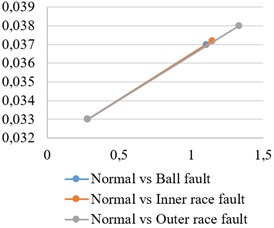
a)
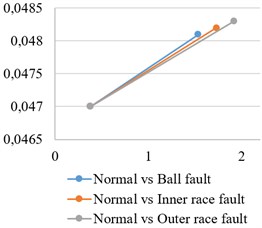
b)
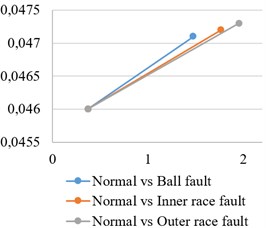
c)
Finally, we note that numerous experimental analysis results, associated with the same vibration signals (Fig. 1) and obtained by exploring domain fragments of triple and fourfold size (in comparison to that of range fragments), have not established any conspicuous new facts. The larger difference between the size of range and domain fragments, somewhat worse (in the mean squared error sense) pairings have been detected in the signal. On the other hand, the displacement of “pool” centres was visible fairly well.
7. Conclusion and discussion
This paper presents the mathematical interpretation of the fragmentary smoothness of the vibro-acoustic signal. The smoothness of the signal is assumed to be a real number characterizing the downtrend of the spectral DT coefficients, as their serial numbers increase.
A novel iterative procedure for finding the signal smoothness parameter values (smoothness estimates) with a required degree of accuracy is proposed. The exceptionally important invariance property of the signal smoothness estimates is formulated and proved, i.e. it is shown that the signal smoothness estimate is left unchanged, as the vibro-acoustic signal is inversed or multiplied by a scalar.
In the paper, a great attention is paid to the necessary signal similarity condition. It is proved that small fragmentary changes in the vibro-acoustic signal lead to small changes in the signal smoothness parameter value. Preliminary experimental analysis results showed that the use of the necessary signal similarity condition might be of service in speeding-up some computational processes associated with fractal interpolation of vibro-acoustic signals, forecasting of real time series, detection of self-similarities in vibro-acoustic signals, early gear fault diagnosis, data mining, etc.
In particular, application of the introduced signal analysis schemes to the processing of a large number of vibration signals, associated with the gradually deteriorating condition of the rolling bearing, would necessarily facilitate computing of tolerance, risk and fault intervals for the averaged centres, discussed in Section 6. The latter centres, without any doubt, can be explored efficiently in the early fault diagnosis of the machinery.
References
-
Luo G. Y., Osypiw D., Irle M. Real-time condition monitoring by significant and natural frequencies analysis of vibration signal with wavelet filter and autocorrelation enhancement. Journal of Sound and Vibration, Vol. 236, Issue 3, 2000, p. 413-430.
-
Ding H., Trajcevski G., Scheuermann P., Wang X., Keogh E. Querying and mining of time series data: experimental comparison of representations and distance measures. Proceedings of 34th International Conference on Very Large Data Bases, 2008, p. 1542-1552.
-
Fayyad U., Piatetsky-Shapiro G., SmythP. From data mining to knowledge discovery in databases. AI Magazine, Vol. 17, Issue 3, 1996, p. 37-54.
-
Ye N. The Handbook of Data Mining. Lawrence Erlbaum, Mahwah, NJ, 2003.
-
Keogh E., KasettyS. On the need for time series data mining benchmarks: A survey and empirical demonstration. 8th International Conference on Knowledge Discovery and Data Mining, Vol. 7, Issue 4, 2002, p. 349-371.
-
Mitianoudis N., Stathaki T., Constantinides A. G. Smooth signal extraction from instantaneous mixtures. IEEE Signal Processing Letters, Vol. 14, Issue 4, 2007, p. 271-274.
-
Javidi S., Mandic D. P. A fast algorithm for blind extraction of smooth complex sources with applications in EEG conditioning. Proceedings of the IEEE MLSP Workshop, 2010, p. 397-402.
-
Doukhan P., Oppenheim G., Taqqu M. S. Theory and Applications of Long-Range Dependence. Springer Science and Business Media, 2003.
-
Hsu C. T., Wu J. L. Energy compaction capability of DCT and DHT with CT image constraints. Proceedings of the International Conference on Digital Image Processing, 1997, p. 345-358.
-
Žumbakis T., Valantinas J. Definition, evaluation and task-oriented application of image smoothness estimates. Information Technology and Control, Vol. 2, Issue 31, 2004, p. 16-23.
-
Ahmed N., Rao K. R. Orthogonal Transforms for Digital Signal Processing. Springer-Verlag, 1975.
-
Valantinas J., Rindzevičius R. Collage-based interpolation of real-data sets. Information Technology and Control, Vol. 37, Issue 3, 2008, p. 187-192.
-
Fisher Y. Fractal Image Compression – Theory and Application. Springer-Verlag, New York, 1994.
-
Bearing Data Center. Case Western Reserve University, http://csegroups.case.edu/bearing datacenter/pages/download-data-file.
About this article

