Informatics
Editor's pick
Research Article
Predicting equipment utilization in agricultural tractors using field data and machine learning
By Ali Can Tellioğlu, Hüseyin Yüce, Uğur Kesen, Aykut Dana
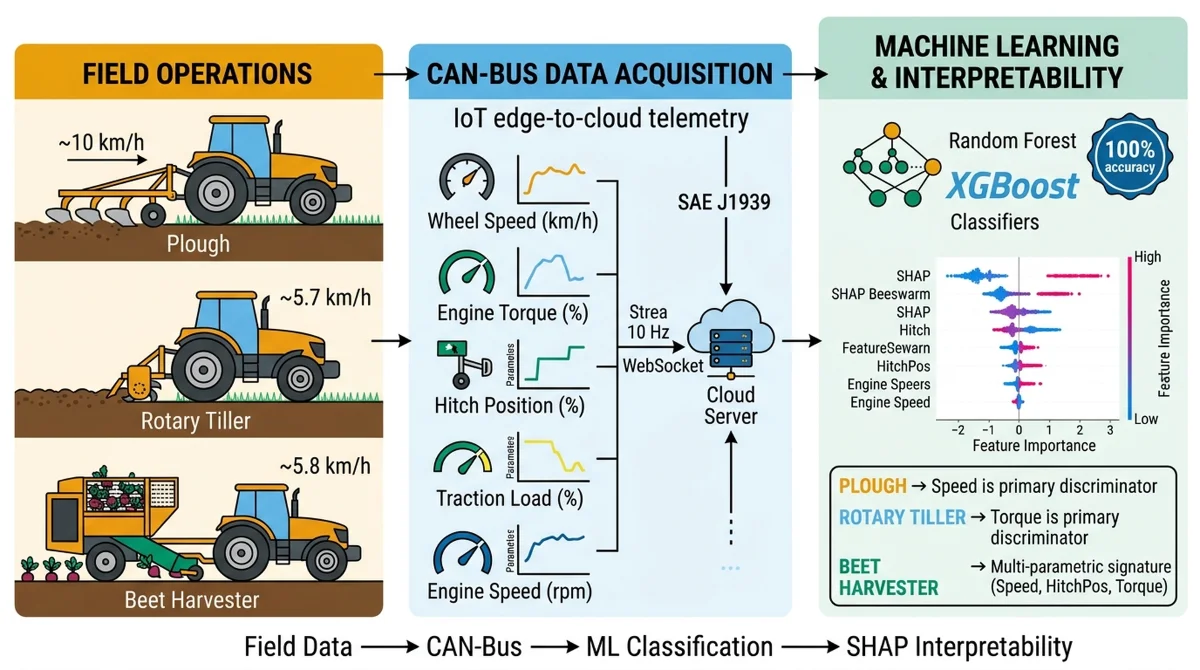
Determining the implement in use during agricultural tractor operations from onboard data alone represents a practical challenge in field equipment utilization monitoring. This study investigates whether standard tractor CAN-Bus signals are sufficient to automatically identify the active implement without additional sensing hardware or manual operator input. Field tests were conducted with a 105 HP agricultural tractor performing three distinct operations ploughing, rotary tilling, and beet harvesting under real field conditions. A dataset was recorded at 10 Hz via an IoT-based edge-to-cloud telemetry system across five SAE J1939 parameters: wheel-based vehicle speed, engine torque percentage, hitch position, traction load, and engine speed. Random Forest and XGBoost classifiers were trained on the collected field data, and both achieved perfect classification performance on stratified hold-out test data. SHAP-based sensitivity analysis was subsequently applied to quantify the contribution of each parameter to the classification decisions and to validate the physical interpretability of the learned models. Class-level analysis further revealed that each operation is governed by a distinct feature hierarchy: speed is the primary discriminator for ploughing, torque dominates rotary tillage identification, and beet harvesting exhibits a distributed multi-parametric signature. These results demonstrate that routine CAN-Bus field data contains sufficient information to reliably predict equipment utilization, offering a scalable and infrastructure-free approach to implement identification in agricultural machinery.
June 4, 2026
Informatics
Most cited
Research Article
Optimization and modelling of mahua oil biodiesel using RSM and genetic algorithm techniques
By Aditya Kolakoti, Panchanand Jha, Prakasa Rao Mosa, Manohar Mahapatro, Tulasi Ganesh Kotaru
June 2, 2020
Informatics
Most cited
Research Article
Optimization of palm methyl ester and its effect on fatty acid compositions and cetane number
By Sharath Satya, Aditya Kolakoti, Naga Raju B., Shyam Sundar R., Ranga Rao
March 31, 2019
Informatics
Most cited
Research Article
Mathematical modeling of forced oscillations of semidefinite vibro-impact system sliding along rough horizontal surface
By Vitaliy Korendiy, Volodymyr Gursky, Oleksandr Kachur, Volodymyr Gurey, Oleksandr Havrylchenko, Oleh Kotsiumbas
December 2, 2021
Informatics
Most cited
Research Article
Performance of PID-Fuzzy control for cab isolation mounts of soil compactors
By Vanliem Nguyen, Renqiang Jiao, Vanquynh Le, Anhtan Hoang
December 31, 2019
Informatics
Robotic Systems and Applications
Research Article
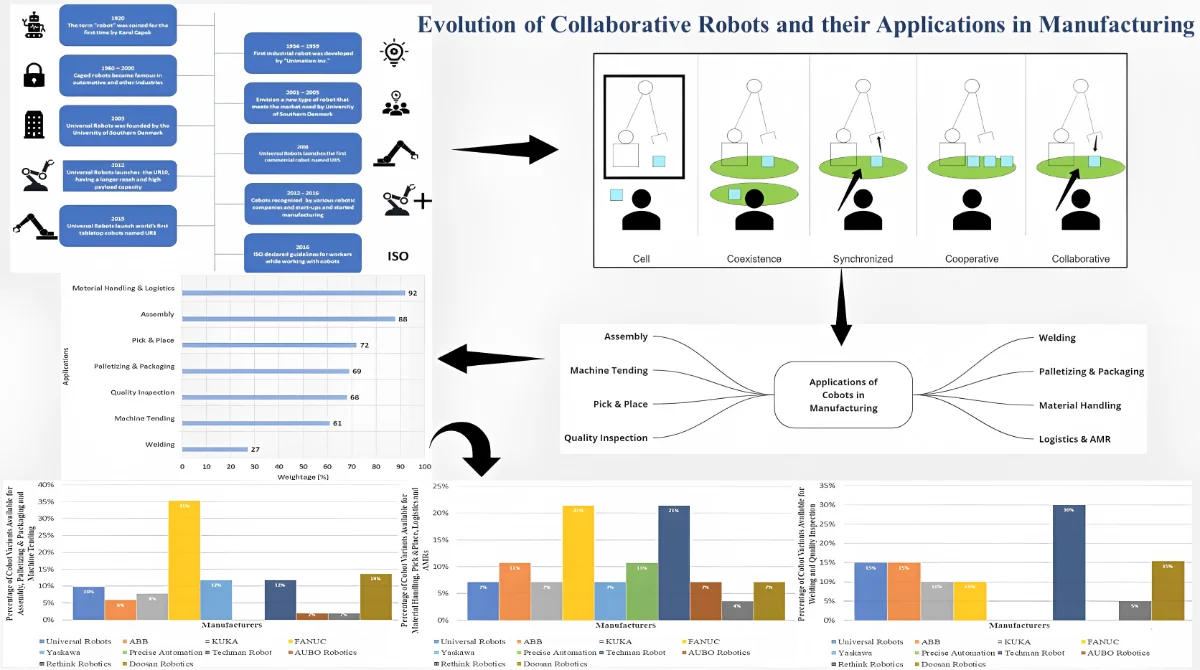
Applications of collaborative robots in agile manufacturing: a review
Collaborative robots are machines that work hand in hand with humans; or as the name suggests, collaborate with them in a specific workspace. These robots are not enclosed in confined safety zones like traditional robots, as they interact very closely with humans. Though this is the case, appropriate measures are captivated while designing these robots considering human safety. These robots are well-versed in adapting to changes and frequent upgrades. They are flexible enough to carry out complex tasks. Due to these abilities, they become a significant asset in the manufacturing field. It’s been many years now since cobots are introduced in the industry sector. So, this is the right time to review various applications of cobots in manufacturing. First, the paper starts with a brief introduction followed by an extensive literature review which was structured after reviewing 76 research papers and articles. It ends with some essential conclusions. This paper discusses the diverse applications of cobots used in the manufacturing sector and their advantages. Further, it highlights the future of cobots and how they will be a boon for a technology-driven world.
June 26, 2023
Biomechanics
Research Article
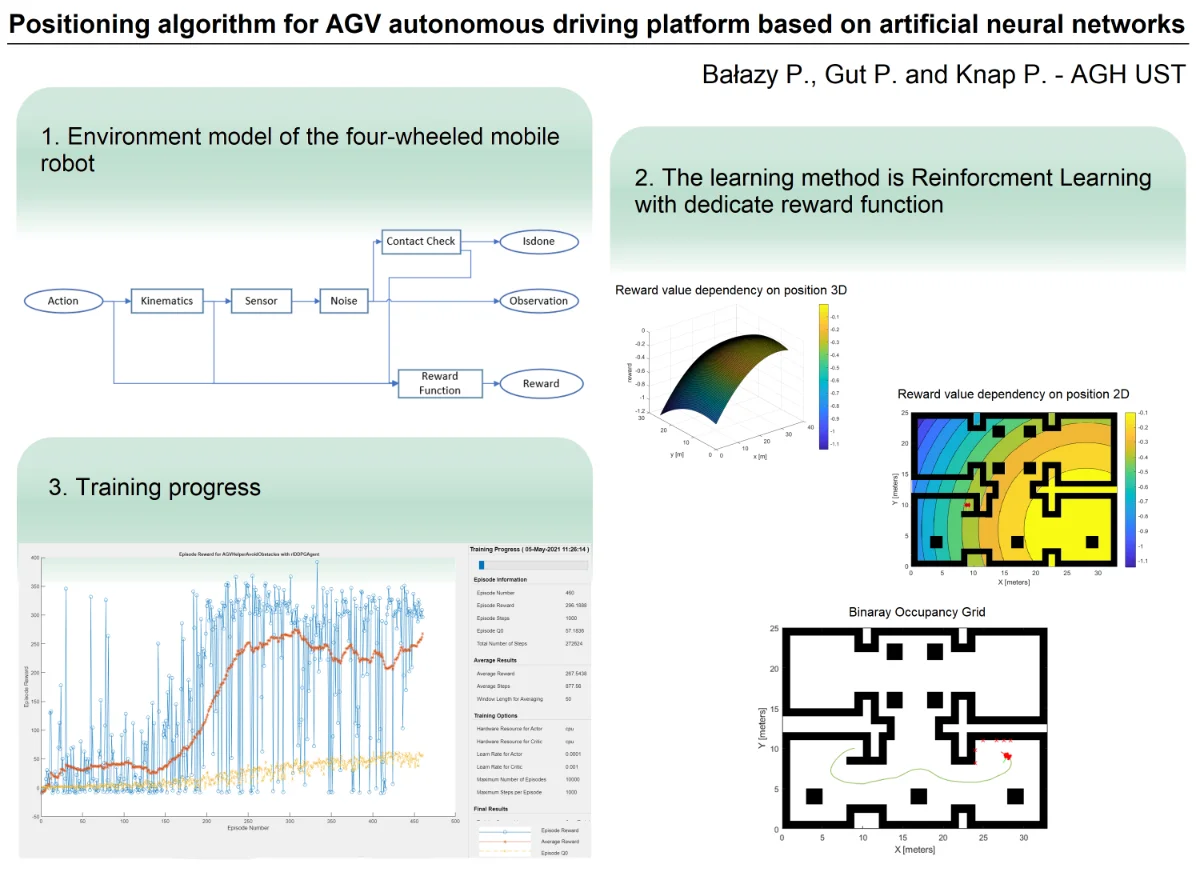
Positioning algorithm for AGV autonomous driving platform based on artificial neural networks
This paper presents an artificial intelligence algorithm responsible for the autonomy of a platform. The proposed algorithm allows the platform to move from an initial position to a set one without human intervention and with understanding and response to the dynamic environment. The implementation of such a task is possible by using a combination of a camera identifying the environment with a laser LIDAR sensor and a vision system. The signals from the sensors are analysed through convolutional neural networks. Based on AI inference, the platform makes decisions, including determining the optimal path for itself. A transfer learning method will be used to teach the neural network. This article presents the results of learning the applied neural algorithm.
August 11, 2021
Biomechanics
Research Article
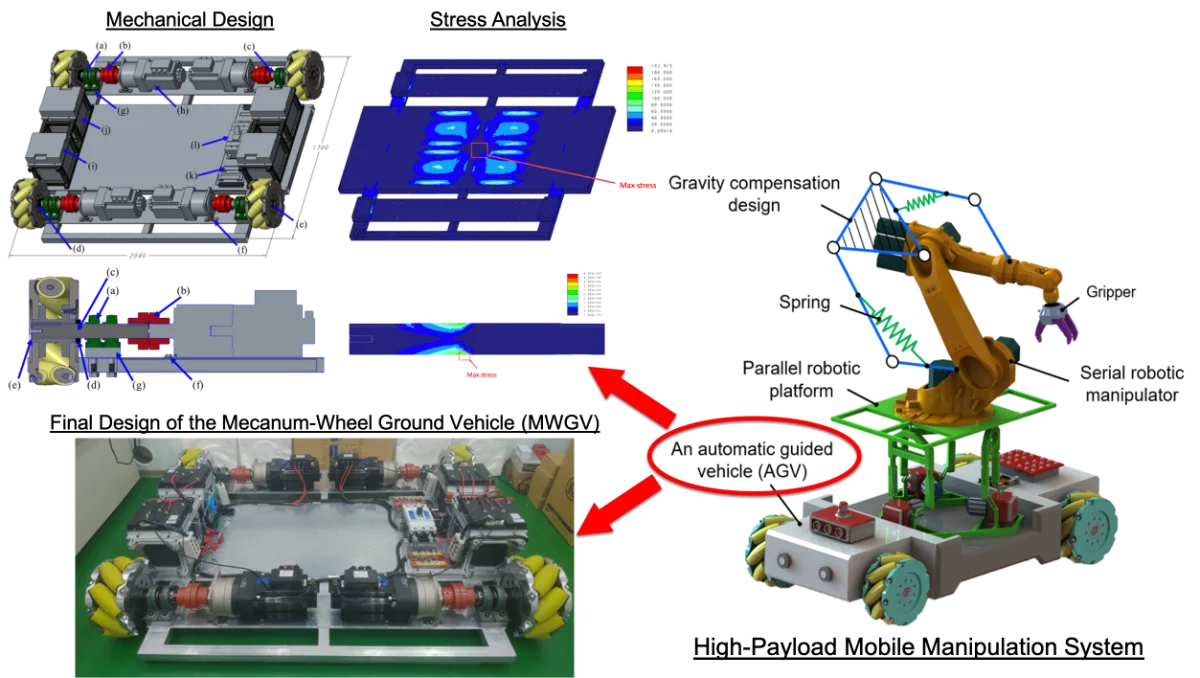
Design of a high-payload Mecanum-wheel ground vehicle (MWGV)
With the rapid developments of Industry 4.0 and Smart Manufacturing, customized manufacturing has been becoming greatly needed. Meanwhile, the challenge of production automation has become more bigger, especially for the automation of moving, picking, placing and manipulating objects. Many researchers have begun to work on Autonomous Ground Vehicles (AGVs). Most AGVs were utilized to carry middle or small objects, as the high-payload AGVs were rarely developed. This paper focused on the design of a High-Payload Mecanum-Wheel Ground Vehicle (MWGV), which was 1.7 m wide and 2.04 m long. The weight of the vehicle was 740 kg and it was able to carry the payload as its own weight (i.e. around 7,300 N). The safety factor of the structural strength was greater than 1.66 and the safety factor of the axial design was at least 6.24. The vehicle was designed to carry 150-kg weight with a reach of 1.375 m without falling. The design of Mecanum wheels provided great flexibility on movement with small rotational radius. Mathematical descriptions about how Mecanum wheels were controlled was also introduced in this paper. Furthermore, the mechatronics and software integrations were demonstrated. The final experimental results showed the developed MWGV was able to perform the desired movement properly.
June 30, 2021
Biomechanics
Research Article
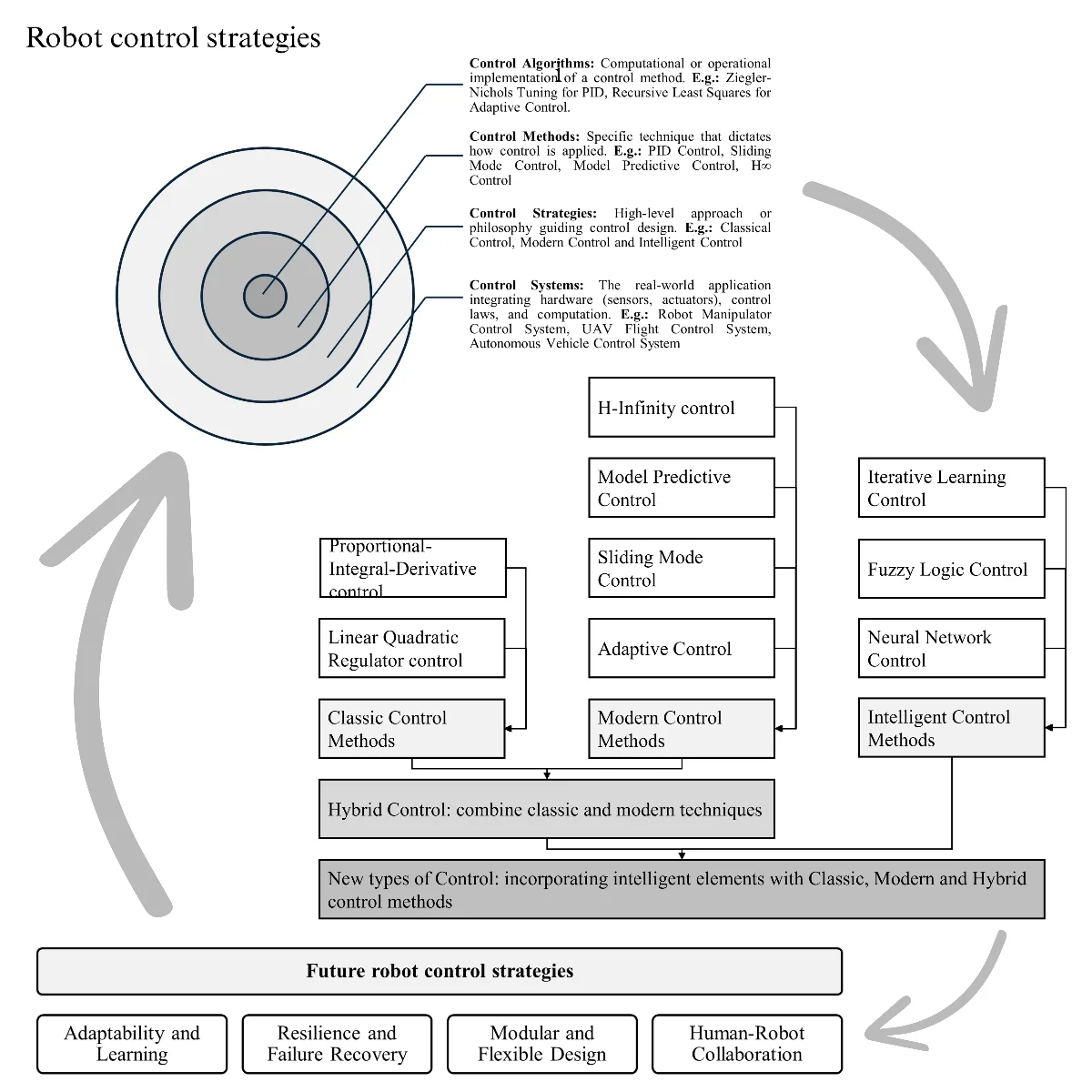
An integrative review of control strategies in robotics
This paper presents an integrative review of control strategies in robotics, covering classical control methods (linear quadratic regulator, proportional-integral-derivative), modern methods (adaptive, sliding mode, model predictive, and H-infinity), intelligent control methods (neural network, fuzzy logic, and machine learning), and hybrid control methods (integration of classical, modern, and intelligent control methods) to identify the advantages, limitations and gaps for future. A brief comparison of control methods between the types of control strategies is conducted with respect to robustness, stability, and complexity of implementation on 3 different levels of evaluation criteria: high, average, and low; advantages; limitations; and robotic applications, including examples. This paper discusses the theoretical and practical advancements and the classification of control strategies according to controller types (linear, nonlinear, and learning-based), approaches (model-based and model-free), and classifications (centralized, decentralized, and modal control). The review highlights the strengths, limitations, and potential research directions in bridging classical, modern, intelligent, and hybrid control paradigms to achieve safe, efficient, and adaptive robotic behavior in complex, uncertain environments. We discuss the future direction: autonomy, human-robot collaboration, and enhanced learning and challenges: cost, reliability, safety of control strategies, concluding with recommendations for future research.
July 10, 2025
Informatics
Robotic Systems and Applications
<p>Fundamental and applied aspects in robotics</p>
APC
Free of charge
Best of Theme
Most cited
Research article
August 17, 2022
Application of A* algorithm in intelligent vehicle path planning
By Ruili Wang, Zhizhan Lu, Yunfeng Jin, Chao Liang
Most cited
Research article
October 19, 2020
An improved mesh stiffness calculation model of spur gear pair under mixed EHL friction with spalling effect
By Siyu Wang, Rupeng Zhu
Most cited
Research article
October 19, 2020
Optimal design parameters of air suspension systems for semi-trailer truck. Part 2: results and discussion
By Nguyen Van Tuan, Le Van Quynh, Vi Thi Phuong Thao, Le Quang Duy
Most cited
Research article
January 31, 2022
Fault identification and remaining useful life prediction of bearings using Poincare maps, fast Fourier transform and convolutional neural networks
By Aditya Majali, Advait Mulay, Venugopalan Iyengar, Aniruddha Nayak, Pravin Singru
You might also like
Most downloaded
Research Article
Mathematical modeling of first order process with dead time using various tuning methods for industrial applications
By Sathish Kumar Shanmugam, Yuvaraj Duraisamy, Meenakumari Ramachandran, Senthilkumar Arumugam
The proposed research involves Mathematical modeling for first order process with dead time using various tuning methods for industrial applications. Different tuning methods are proposed. Proposed method selection depends on plant operating conditions and also depending upon the process dynamics. The PID controller is most widely used for industrial process control. Modeling were developed for modified internal control model [4-6] in this proposed research. The proposed work is the modeling and simulation of three different first order processes with dead time. The standard controller tuning method is used to obtain the steady state response of first order with dead time.
March 31, 2019
Informatics
Most downloaded
Research Article
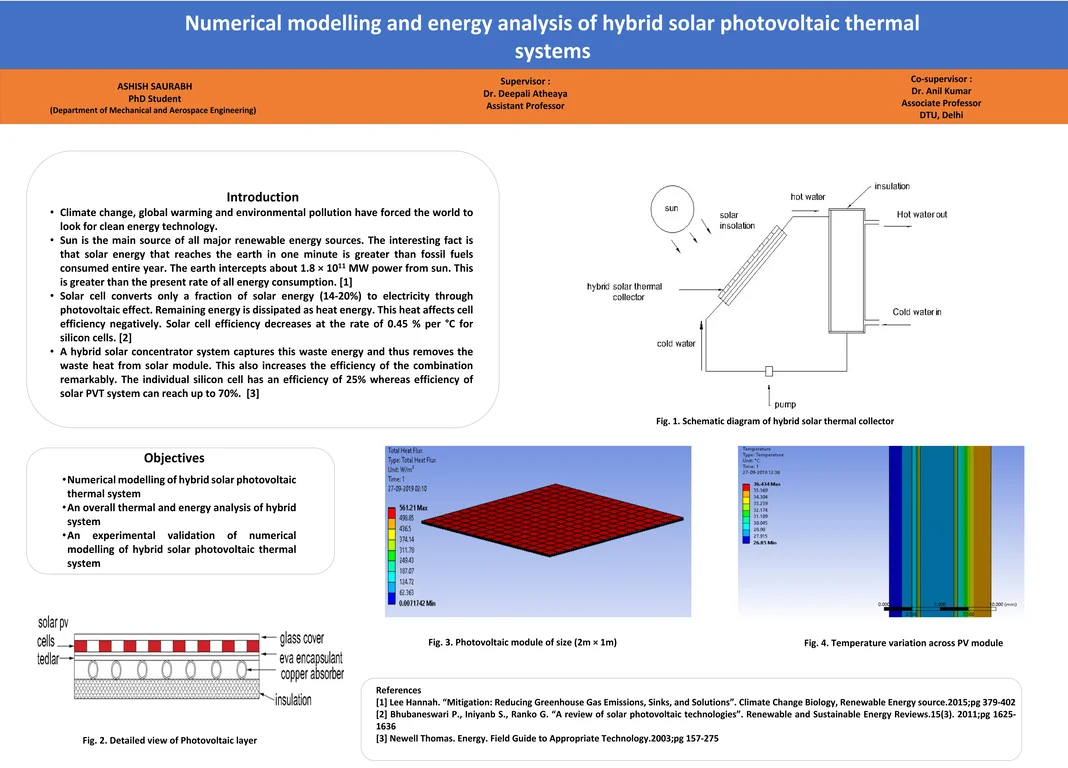
Computational fluid dynamics (CFD) modelling of hybrid photovoltaic thermal system
By Ashish Saurabh, Deepali Atheaya, Anil Kumar
In this paper an attempt has been made to simulate and evaluate the distribution of temperature and heat flux for the hybrid photovoltaic thermal system with CFD (computational fluid dynamics) module in ANSYS 19.1 software. The simulation was carried to determine the temperature and heat flux across the different layers of HPVT (hybrid photovoltaic thermal) system. The temperature and heat flux were found to gradually decrease from the top glass layer to the bottom tedlar layer. The temperature varied from 36.4 °C (ambient) to 26.8 °C across the layers from top glass layer to bottom tedlar layer. The heat flux of (561.2 W/m2) at the glass layer due to solar insolation was also found to gradually decrease with the increasing thickness. The reduction in temperature and heat flux with increasing thickness is attributed to fluid flowing beneath the system. The water flowing beneath the tedlar layer takes the excess heat out of the photovoltaic layer, thereby increasing the efficiency of the hybrid photovoltaic thermal system.
November 28, 2019
Informatics
Maintenance, repair, and overhaul of robotic systems
This paper not only explores the fundamental aspects of but also brings new ideas for maintenance, repair, and overhaul (MRO) operations of robotic systems (RS). This synthesis is based on the limited scholarly research in this area and on information gathered from comprehensive web searches and analysis of corporate websites so that the results reflect the current views of RS developers and operators. The paper describes several crucial areas concerning RS MRO: maintenance of robotic systems, challenges and best practices for RS MRO, predictive maintenance variables and key performance indicators, data analytics, software solutions for RS MRO, and logistics/supply chain approach that should be considered. These insights provide not only a comprehensive understanding of the current state of RS MRO but also describe trends and suggestions for the future of RS MRO, emphasizing the novelty of the proposed research conducted. Key trends that organizations will need to address include the use of artificial intelligence (AI) models and the increasing importance of RS MRO logistics and supply chain management.
Experimental setup for unbalance fault detection and vibration analysis in a cardan shaft (Part B)
This paper experiments a vibration measurement on a twin-rotor connected by a Hooke’s joints. An experimental set-up for vibration analysis and unbalance fault detection in rotating machinery has been conducted to reveal the unbalance effect in signal transmission of the interconnected shaft through Hooke’s joint. Vibrations signals were measured and analysed using the Fast Fourier Transform (FFT), orbit patterns and time displacement of each rotor centre, to extract the signature of the unbalance fault. The results indicate the accuracy of the discussed approach for the twin-rotor unbalances diagnosis in an interconnected shafts system through a Hooke’s joint.