Biomechanics
Editor's pick
Research Article
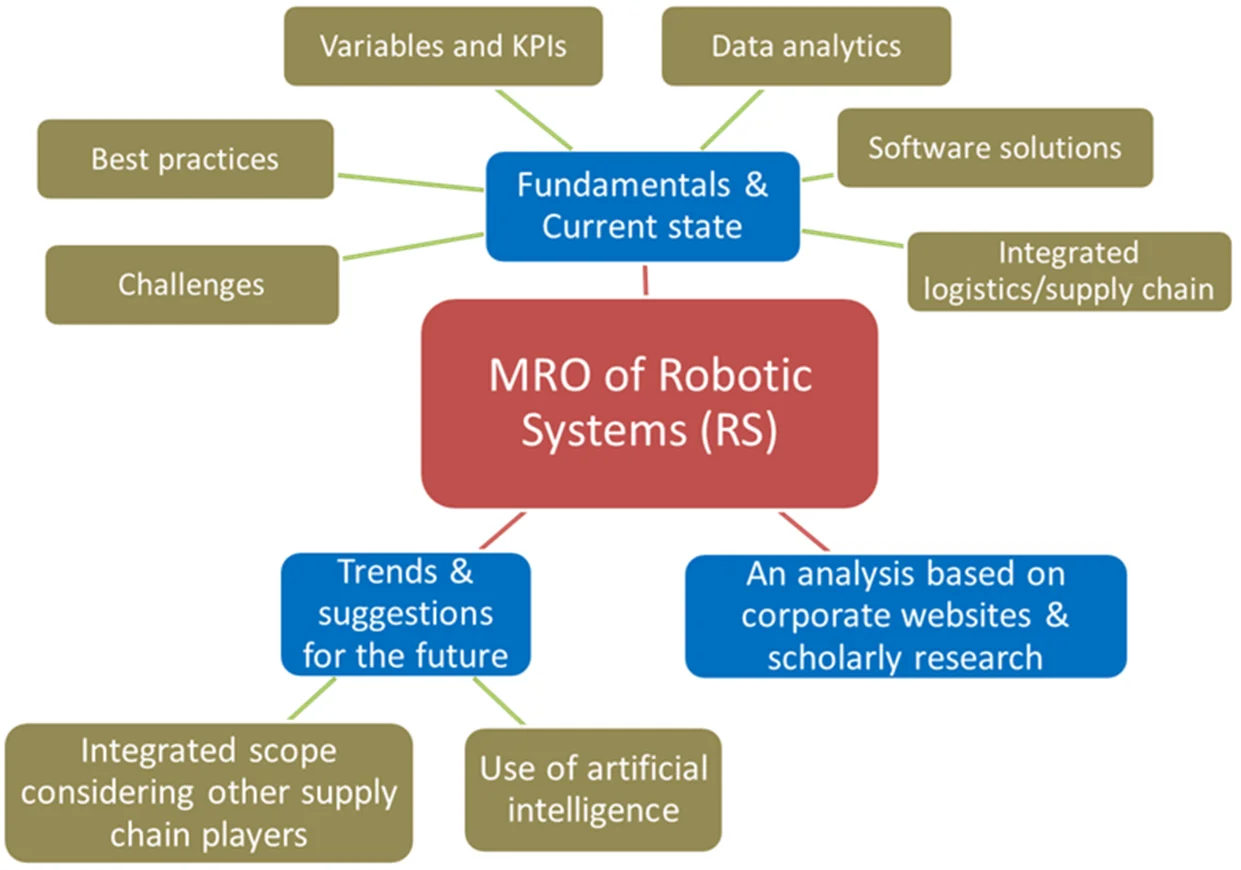
Maintenance, repair, and overhaul of robotic systems
By Guilherme E. Vieira, Jeffrey W. Herrmann
This paper not only explores the fundamental aspects of but also brings new ideas for maintenance, repair, and overhaul (MRO) operations of robotic systems (RS). This synthesis is based on the limited scholarly research in this area and on information gathered from comprehensive web searches and analysis of corporate websites so that the results reflect the current views of RS developers and operators. The paper describes several crucial areas concerning RS MRO: maintenance of robotic systems, challenges and best practices for RS MRO, predictive maintenance variables and key performance indicators, data analytics, software solutions for RS MRO, and logistics/supply chain approach that should be considered. These insights provide not only a comprehensive understanding of the current state of RS MRO but also describe trends and suggestions for the future of RS MRO, emphasizing the novelty of the proposed research conducted. Key trends that organizations will need to address include the use of artificial intelligence (AI) models and the increasing importance of RS MRO logistics and supply chain management.
December 29, 2025
Biomechanics
Most cited
Research Article
A portable breast cancer detection system based on smartphone with infrared camera
By Jian Ma, Pengchao Shang, Chen Lu, Safa Meraghni, Khaled Benaggoune, Juan Zuluaga, Noureddine Zerhouni, Christine Devalland, Zeina Al Masry
September 26, 2019
Biomechanics
Most cited
Research Article
Study of CO2 emissions from energy consumption in Spanish hospitals
By Justo García-Sanz-Calcedo
September 26, 2019
Biomechanics
Most cited
Research Article
Positioning algorithm for AGV autonomous driving platform based on artificial neural networks
By Patryk Bałazy, Paweł Gut, Paweł Knap
August 11, 2021
Biomechanics
Most cited
Research Article
Configuration design and load capacity analysis of pelvic fracture reduction robot
By Shenyang Cai, Jingtao Lei, Jinjun Rao
April 13, 2023
Biomechanics
Robotic Systems and Applications
Research Article
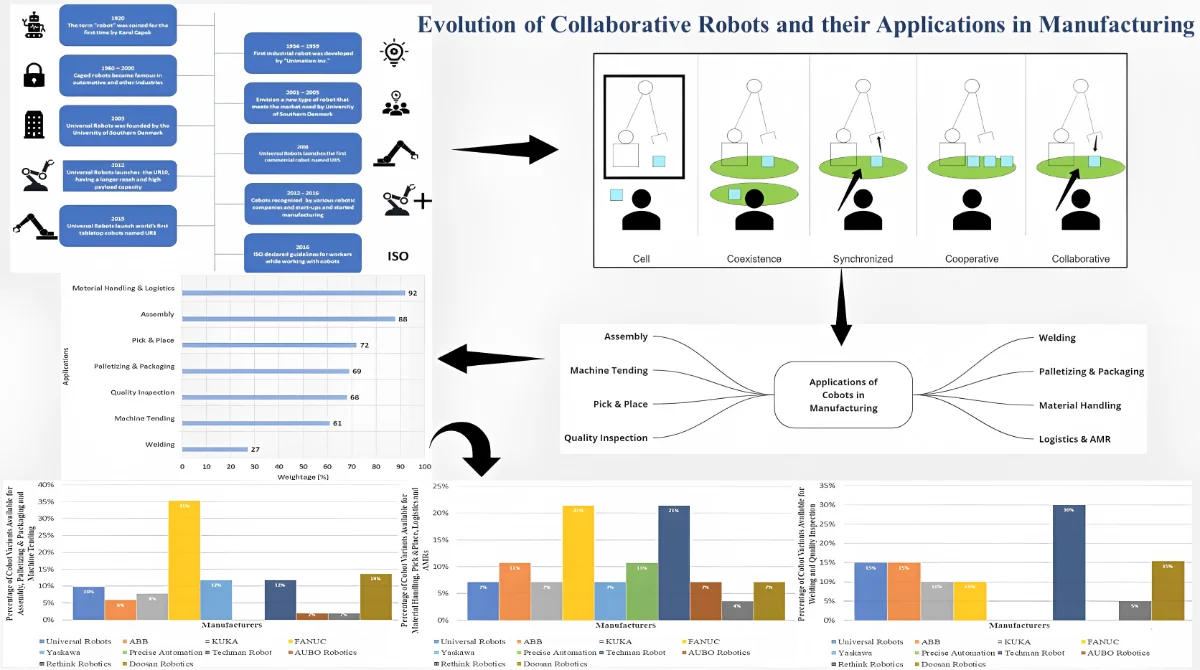
Applications of collaborative robots in agile manufacturing: a review
Collaborative robots are machines that work hand in hand with humans; or as the name suggests, collaborate with them in a specific workspace. These robots are not enclosed in confined safety zones like traditional robots, as they interact very closely with humans. Though this is the case, appropriate measures are captivated while designing these robots considering human safety. These robots are well-versed in adapting to changes and frequent upgrades. They are flexible enough to carry out complex tasks. Due to these abilities, they become a significant asset in the manufacturing field. It’s been many years now since cobots are introduced in the industry sector. So, this is the right time to review various applications of cobots in manufacturing. First, the paper starts with a brief introduction followed by an extensive literature review which was structured after reviewing 76 research papers and articles. It ends with some essential conclusions. This paper discusses the diverse applications of cobots used in the manufacturing sector and their advantages. Further, it highlights the future of cobots and how they will be a boon for a technology-driven world.
June 26, 2023
Biomechanics
Research Article
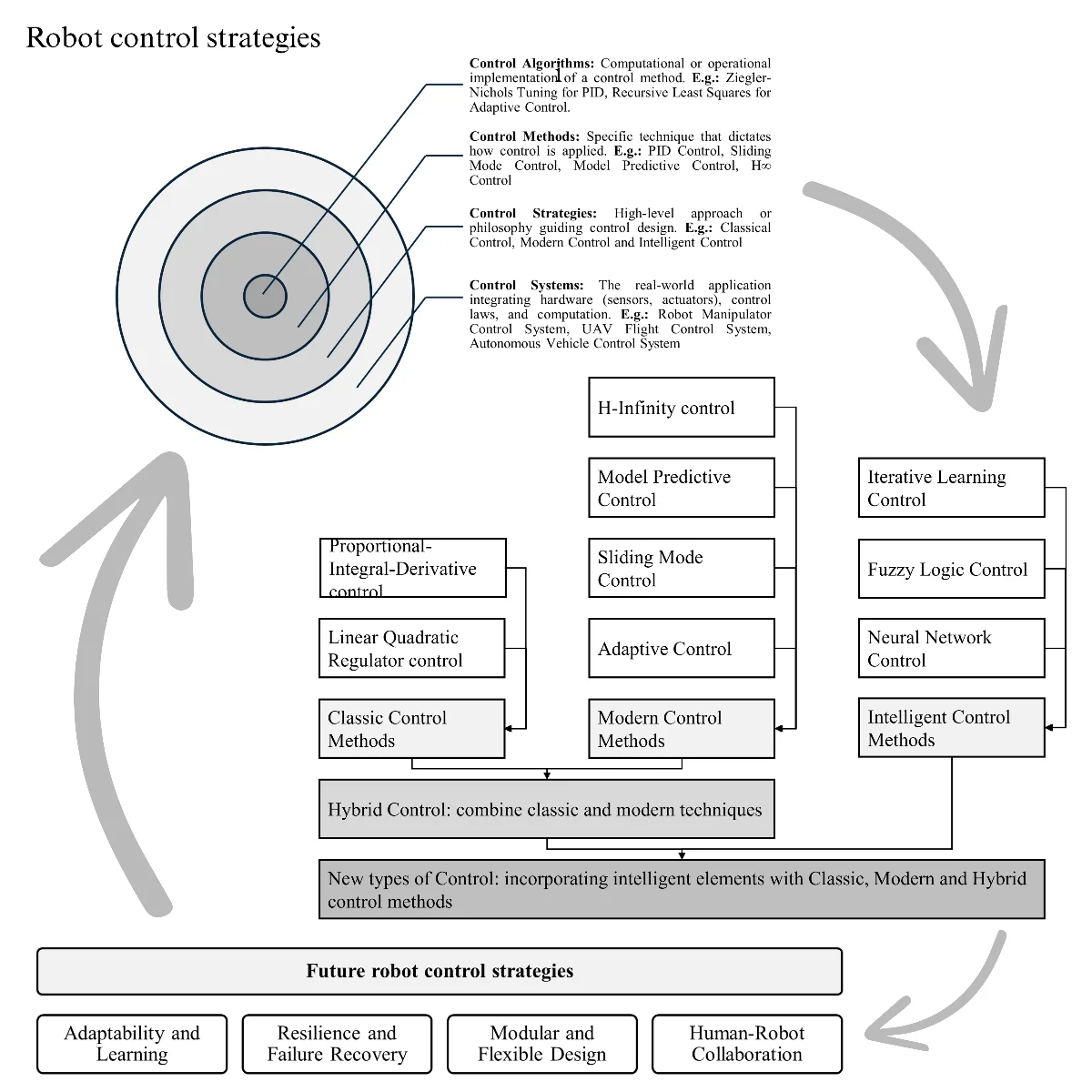
An integrative review of control strategies in robotics
This paper presents an integrative review of control strategies in robotics, covering classical control methods (linear quadratic regulator, proportional-integral-derivative), modern methods (adaptive, sliding mode, model predictive, and H-infinity), intelligent control methods (neural network, fuzzy logic, and machine learning), and hybrid control methods (integration of classical, modern, and intelligent control methods) to identify the advantages, limitations and gaps for future. A brief comparison of control methods between the types of control strategies is conducted with respect to robustness, stability, and complexity of implementation on 3 different levels of evaluation criteria: high, average, and low; advantages; limitations; and robotic applications, including examples. This paper discusses the theoretical and practical advancements and the classification of control strategies according to controller types (linear, nonlinear, and learning-based), approaches (model-based and model-free), and classifications (centralized, decentralized, and modal control). The review highlights the strengths, limitations, and potential research directions in bridging classical, modern, intelligent, and hybrid control paradigms to achieve safe, efficient, and adaptive robotic behavior in complex, uncertain environments. We discuss the future direction: autonomy, human-robot collaboration, and enhanced learning and challenges: cost, reliability, safety of control strategies, concluding with recommendations for future research.
July 10, 2025
Informatics
Research Article
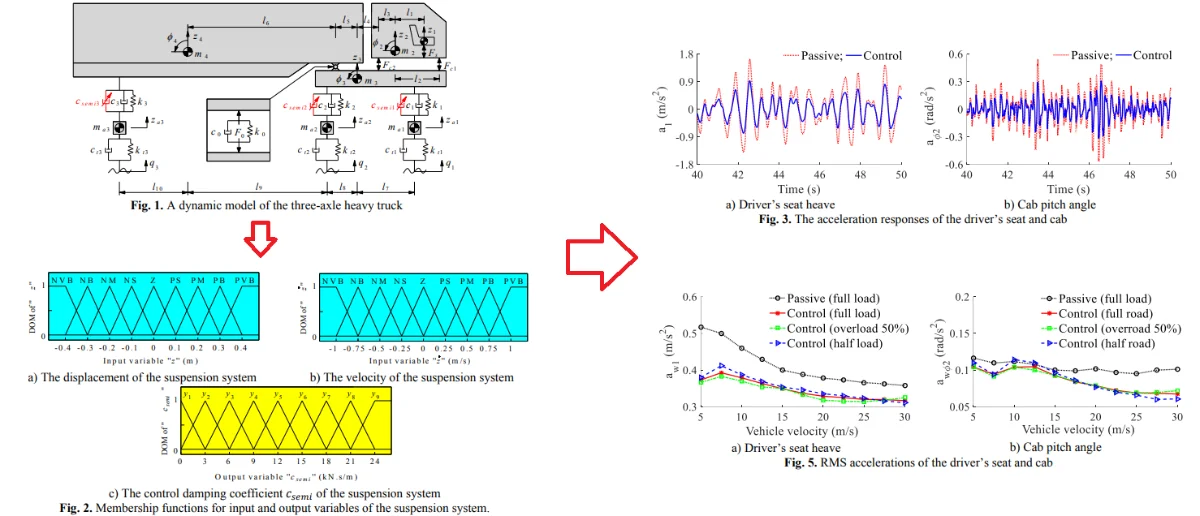
Improving ride comfort and road friendliness of heavy truck using semi-active suspension system
To enhance the ride comfort and improve the road friendliness of the heavy truck, based on the dynamic model of the heavy truck, the semi-active suspension system of the vehicle is proposed and controlled based on the fuzzy logic control and Matlab/Simulink software. The efficiency of the semi-active suspension system is then evaluated based on the indexes of the root mean square acceleration of the driver’s seat, the root mean square acceleration of the cab's pitching angle, and the dynamic load coefficient of the wheel axles. The results show that with the semi-active suspension system of the heavy truck controlled by the fuzzy logic control, the acceleration responses of the heavy truck and the dynamic forces of the wheel axles are greatly reduced in comparison with the passive suspension system under various operating conditions of the loads and speeds. Especially, with the semi-active suspension system controlled by the fuzzy logic control, the root mean square accelerations of the driver’s seat and cab pitch angle; and the dynamic load coefficient at 2nd axle of the wheel are clearly reduced by 23.7 %, 27.2 %, and 20.9 % in comparison with the passive suspension system, respectively. Thus, both ride comfort and road friendliness of the heavy truck are improved by the semi-active suspension system. In addition, the vehicle load insignificantly affects ride comfort. However, it greatly affects the road damage, especially with the half load condition of the vehicle. Thus, to improve road friendliness, the full load condition of the vehicle should be used.
March 13, 2023
Biomechanics

Research Article
Fuzzy adaptive back stepping control of wheeled mobile robot
Wheeled mobile robots (WMR) are unmanned vehicles and practical robots for industry and human life. The low-cost manufacturing, simple assembling, high-speed, lightweight design, and high observability and controllability of the WMRs have attracted the attention of engineering disciplines such as mechanical and electrical science. This paper focuses on the control of wheeled mobile robots through fuzzy adaptive back stepping (ABS). The mathematical model of WMR is divided into two types, including kinematic and dynamic analyses. Actually, this research analyzes the theoretical math model using hybrid methods such as fuzzy logic and adaptive back stepping (BS) to control WMR in both noisy and noiseless conditions along its path. On the other hand, this hybrid controller, because of its more robust performance, can track WMR on its targets. Because of this, WMR's ability to move around makes it choose fuzzy and adaptive back stepping (FABS) methods, which use model-based and time-dependent features, respectively. As a result, the signal inputs fuzzy membership functions, and then the fuzzy approach outputs a new signal that goes to the back-step adaptive controller to finalize the control effort to navigate WMR with the lowest error during its destinations.
June 28, 2025
Industrial Engineering
Robotic Systems and Applications
<p>Fundamental and applied aspects in robotics</p>
APC
Free of charge
Best of Theme
Most cited
Research article
May 15, 2020
Hybrid artificial genetic – neural network model to predict the transmission of vibration to the head during whole-body vibration training
By M. Alshabi, N. Nawayseh, M. Bettayeb
Most cited
Research article
February 11, 2023
Developing of a wearable ankle rehabilitation robotic device
By Nursultan Zhetenbayev, Gani Balbayev, Duisebayeva Aknur, Algazy Zhauyt, Beibit Shingissov
Most cited
Research article
April 2, 2020
A pilot study on automated quantitative grading of facial functions
By Amira Gaber, Mona F. Taher, Manal Abdel Wahed
Most cited
Research article
August 15, 2019
Design and simulation analysis of an improved wearable power knee exoskeleton
By Fangzheng Wang, Lei Yan, Jiang Xiao, Lei Fan
You might also like
Most downloaded
Research Article
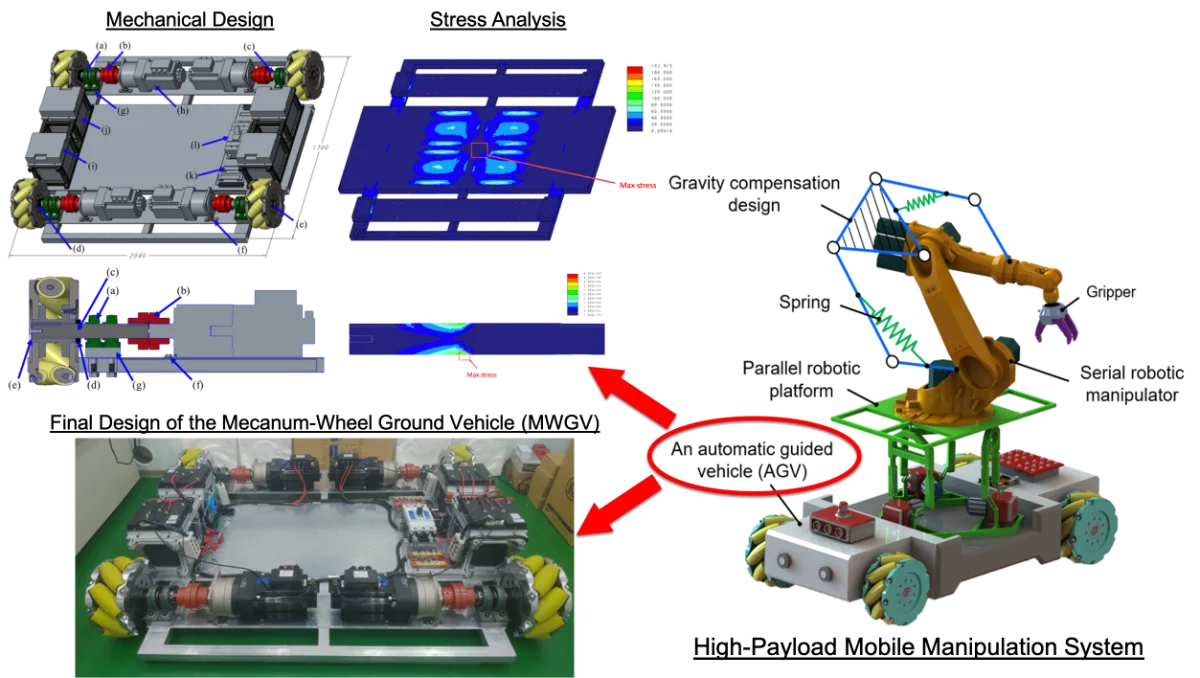
Design of a high-payload Mecanum-wheel ground vehicle (MWGV)
By Zi-Yin Chen, Pei-Ren Liaw, Vu Linh Nguyen, Po Ting Lin
With the rapid developments of Industry 4.0 and Smart Manufacturing, customized manufacturing has been becoming greatly needed. Meanwhile, the challenge of production automation has become more bigger, especially for the automation of moving, picking, placing and manipulating objects. Many researchers have begun to work on Autonomous Ground Vehicles (AGVs). Most AGVs were utilized to carry middle or small objects, as the high-payload AGVs were rarely developed. This paper focused on the design of a High-Payload Mecanum-Wheel Ground Vehicle (MWGV), which was 1.7 m wide and 2.04 m long. The weight of the vehicle was 740 kg and it was able to carry the payload as its own weight (i.e. around 7,300 N). The safety factor of the structural strength was greater than 1.66 and the safety factor of the axial design was at least 6.24. The vehicle was designed to carry 150-kg weight with a reach of 1.375 m without falling. The design of Mecanum wheels provided great flexibility on movement with small rotational radius. Mathematical descriptions about how Mecanum wheels were controlled was also introduced in this paper. Furthermore, the mechatronics and software integrations were demonstrated. The final experimental results showed the developed MWGV was able to perform the desired movement properly.
June 30, 2021
Biomechanics
Most downloaded
Research Article
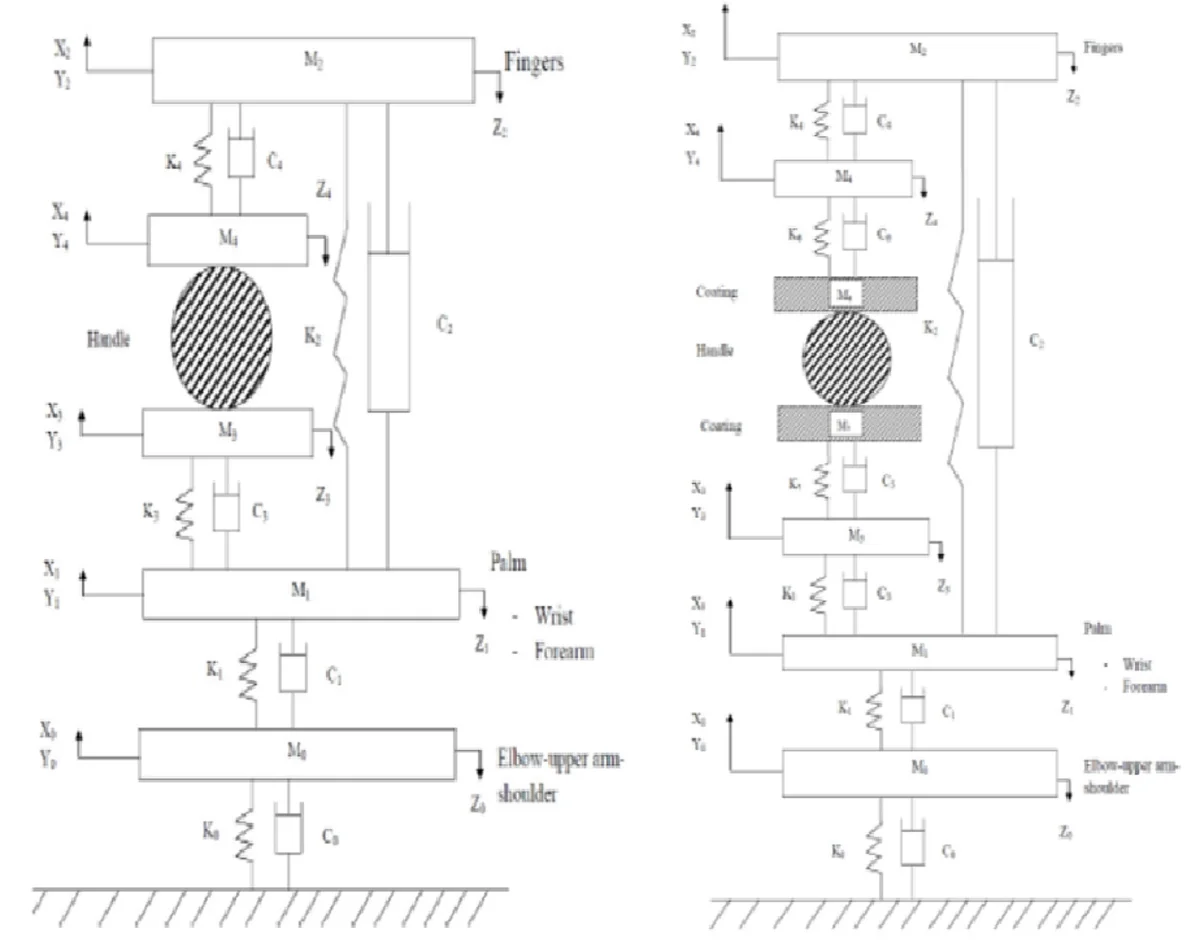
An analytical study – dynamic behavior of the human hand to hold mechanical handle with and without coating
By Jain A. R. Tony Benedict, Alphin Masilamany Santha
The primary objective of the study is analytically predicting the anti-vibration coating on the handles and to evaluate the vibration isolation effectiveness. The ISO 10068:2012 two-point driving human physical models are coated with Foam-A material, Foam-B material, and Gel material. The coated ISO models are applied to predict the effectiveness of three different anti-vibrations coating in terms of vibration transmitted to the finger, palm, and the shoulder. The results are obtained as a vibration transmissibility magnitude in the three orthogonal directions (xh, yh, zh) and the results are also compared with uncoated models. A significant level of vibration reductions was found. The proposed model may also be useful for further analysis of anti-vibration coating materials and help designers to develop better handles for vibrating tools.
December 13, 2018
Biomechanics
Control system design of multi-dimensional lumbar traction treatment bed
A multi-dimensional lumbar traction treatment bed is designed with two degrees of freedom, which can realize controllable traction treatment of lumbar through flexion, extension and rotation motion. Two linear actuators are used to provide motion. Building a mathematical model of the device by least squares identification. PID controller and Kalman filter constitute two groups of control modes: (i) speed control; (ii) position control. Using MATLAB to perform simulation experiments. The results show that the designed controller can achieve high control accuracy. The motion speed of lumbar platform is stable and the position of traction treatment set by user is approached exactly, which ensuring the security and stability of this device.
On application of dynamical system methods in biomedical engineering
The spectrum of various methods and tools used for solving bioengineering problems is sufficiently wide. Dynamical systems (including the symbolic ones) in many cases become a base for design and implementation of methods of investigation and computer modeling complex processes. Whereas for solving direct problems we have many well-developed methods, results for inverse problems are much more modest. We discuss two methods for such tasks: Takens’ method for reconstruction attractor by a time series, and the based on ideas of symbolic dynamics method for digital image analysis using stationary flow on graph and weighted entropy. The results of numerical experiments are given.